摘要:克拉瑪依職業(yè)技術學院機械工程分院馬尚鵬團隊在《石河子大學學報(自然科學版)》發(fā)表論文《 整垛袋裝物料裝載裝置的設計與試驗 》,該研究針對整垛袋裝物料裝載效率低、托盤回收率不足
克拉瑪依職業(yè)技術學院機械工程分院馬尚鵬團隊在《石河子大學學報(自然科學版)》發(fā)表論文《整垛袋裝物料裝載裝置的設計與試驗》,該研究針對整垛袋裝物料裝載效率低、托盤回收率不足的行業(yè)痛點,設計了集物料裝載與托盤回收功能于一體的旋轉式推進裝載裝置,通過靜力學分析與試驗驗證,證實裝置結構安全可靠,裝載效率與成本優(yōu)勢顯著,為物流裝載設備升級提供了新方案。
物流業(yè)作為國民經濟基礎性產業(yè),裝載效率與成本控制是行業(yè)核心訴求。傳統裝載裝置多聚焦單一裝載功能,忽略托盤回收環(huán)節(jié),導致物流成本居高不下,且部分設備存在自動化程度低、應用場景受限等問題。研發(fā)兼具高效裝載與托盤回收功能的一體化設備,成為推動物流行業(yè)降本增效的關鍵。
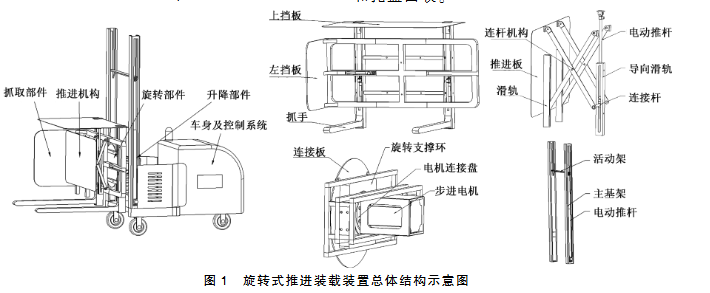
團隊設計的裝載裝置由抓取部件、推進機構、旋轉部件、升降部件及電控系統組成,以蓄電池為動力源,通過電控系統實現抓取、旋轉、升降、推進等自動化動作。裝置工作時,先由抓取部件叉入托盤雙孔夾緊物料,經升降、180°旋轉調位后完成裝載,再通過反向旋轉回位托盤并實現回收,全程無需人工過多干預。
為確保結構安全性,團隊針對物料裝載過程中抓手、左擋板、上擋板分別承受物料自重的3種核心工況,采用Ansys Workbench進行靜力學仿真。結果顯示,3種工況下抓取部件最大變形量分別為13.26mm、20.22mm、24.95mm,最大等效應力分別為275.36MPa、306.42MPa、323.56MPa,均小于合金鋼20Cr的許用應力,驗證了結構設計的合理性。
在石河子大學實訓中心開展的試驗中,裝置表現亮眼:裝載高度1m時最短作業(yè)時間僅47.5s,1.5m時為57.1s,各組試驗數據波動小,作業(yè)穩(wěn)定性良好。與傳統叉車對比,該裝置可節(jié)約裝載成本57.5%,提高裝載效率11.9%,有效解決了傳統設備功能單一、成本高的難題。
該裝置的成功研發(fā),實現了整垛袋裝物料裝載與托盤回收的一體化、自動化作業(yè),不僅提升了物流裝載環(huán)節(jié)的效率與經濟性,也為現代化物流設備的智能化、多功能化發(fā)展提供了重要技術支撐,具有廣闊的行業(yè)應用前景。
聲明:
①文獻來自知網、維普、萬方等檢索數據庫,說明本文獻已經發(fā)表見刊,恭喜作者.
②如果您是作者且不想本平臺展示文獻信息,可聯系學術顧問予以刪除.




