摘要:針對整垛袋裝物料裝載過程中裝載效率低、托盤回收率不足的問題,設計了一種集物料裝載與托盤回收功能于一體的新型物流裝載設備整垛袋裝物料旋轉式推進裝載裝置。闡述了該裝置的總體
針對整垛袋裝物料裝載過程中裝載效率低、托盤回收率不足的問題,設計了一種集物料裝載與托盤回收功能于一體的新型物流裝載設備——整垛袋裝物料旋轉式推進裝載裝置。闡述了該裝置的總體方案設計、工作原理及受力特性,分析了其3種主要工況,并通過靜力學仿真獲得各工況下抓取部件的力學響應;開展整垛袋裝物料裝載試驗,驗證裝置的性能與可靠性。結果表明:3種工況下抓取部件的最大變形量分別為13.26 mm、20.22 mm、24.95 mm,最大等效應力分別為275.36 MPa、306.42 MPa、323.56 MPa,均小于材料許用應力(360 MPa);裝載高度為1 m和1.5 m時,裝置完成物料裝載的最短時間分別為47.5 s和57.1 s,與傳統叉車相比,可節約裝載成本57.5%,提高裝載效率11.9%。該裝置功能完整、結構安全可靠,能高效完成物料裝載與托盤回收工作,為現代化物流裝載設備升級提供了技術支撐。
關鍵詞:裝載裝置;整垛袋裝物料裝載;托盤回收;靜力學仿真
論文《整垛袋裝物料裝載裝置的設計與試驗》發表在《石河子大學學報(自然科學版)》,版權歸《石河子大學學報(自然科學版)》所有。本文來自網絡平臺,僅供參考。
一、引言
物流業作為國民經濟的基礎性、戰略性產業,其發展質量與效率直接影響經濟增長與社會發展。裝載機械作為物流企業的核心設備,其自動化程度、裝載效率和運營成本是行業研發的核心評估指標。隨著制造業自動化水平的提升,物流行業對裝載設備的高效性、智能化提出了更高要求,研發新型裝載設備以降低成本、提高效率成為必然趨勢。
現有裝載裝置雖在單一功能(如物料裝載、碼垛)上自動化程度較高,但普遍存在局限性:部分裝置智能化與效率不足,難以滿足當前物流需求;部分適配特定場景但無法實現托盤回收;多數研發僅聚焦裝載效率,忽視了裝載后的托盤回收問題,導致托盤利用率低,增加了物流成本。針對這一現狀,本文設計了集物料裝載與托盤回收功能于一體的旋轉式推進裝載裝置,通過靜力學分析驗證結構安全性,并通過試驗測試其實際作業性能,為樣機試制與后期優化提供理論支撐。
二、裝載裝置方案設計與原理分析
(一)總體方案設計
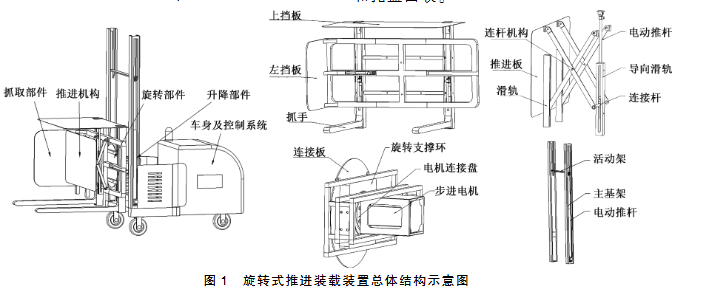
該裝置由抓取部件、推進機構、旋轉部件、升降部件及車身與電控系統5部分鉸接組成,以蓄電池為動力源,通過電控系統控制電動推桿伸縮和步進電機旋轉,實現抓取、旋轉、升降、推進等系列動作,最終完成物料裝載與托盤回收一體化作業。
(二)工作原理與過程
1. 抓取工作:控制抓取部件電動推桿運動,調整抓手位置,叉入托盤雙孔并夾緊整垛袋裝物料,完成包裹抓取。
2. 旋轉工作:升降部件帶動抓取的物料升高至預設裝載高度,旋轉部件步進電機啟動,完成180°旋轉,實現物料與托盤位置調位。
3. 推進工作:裝置移動至裝載區域,推進機構電動推桿伸縮,帶動推進板推出,完成整垛袋裝物料裝載。
4. 回收工作:物料裝載完成后,旋轉部件反向旋轉180°使托盤回位,調整抓手高度后,推進機構再次動作,將托盤推送至回收區域,完成托盤回收。
三、裝載工作受載分析
(一)受力特性與工況劃分
物料裝載過程中,裝置受力集中于抓取部件,且隨旋轉部件運動呈現周期性變化,依次作用于抓手、左擋板和上擋板,對應3種核心工況:
- 工況1:整垛袋裝物料自重完全作用于抓手上;
- 工況2:整垛袋裝物料自重完全作用于左擋板上;
- 工況3:整垛袋裝物料自重完全作用于上擋板上。
(二)受力計算
裝置設計最大裝載質量為600 kg(物料自重G=6 kN),抓取部件自重50 kg(0.5 kN),旋轉部件自重50 kg(0.5 kN)。基于靜力學模型推導各部件受力,關鍵計算結果如下:
- 抓手、左擋板、上擋板的受力均為6 kN;
- 旋轉部件受力F_xz=6.5 kN;
- 升降部件受力F_sJ=7 kN。
四、抓取部件靜力學分析
(一)模型與參數設置
將SolidWorks2020建立的三維模型導入Ansys Workbench 2021R1,抓取部件材料選用合金鋼20Cr(彈性模量2.06×10? MPa,泊松比0.3,密度7850 kg/m³,屈服極限540 MPa)。采用綁定接觸(焊接處)與摩擦接觸(其他部位,摩擦系數0.2),劃分四面體網格,關鍵部位網格加密至5 mm。
(二)仿真結果分析
1. 工況1(載荷作用于抓手):最大變形量13.26 mm(抓手尖端),最大等效應力275.36 MPa(抓取部件與旋轉部件圓孔連接處),均小于許用應力。
2. 工況2(載荷作用于左擋板):最大變形量20.22 mm(左擋板頂端),最大等效應力306.42 MPa(左擋板與基架連接處),滿足安全要求。
3. 工況3(載荷作用于上擋板):最大變形量24.95 mm(上擋板頂端),最大等效應力323.56 MPa(上擋板與基架連接處),未超過材料強度極限。
仿真結果表明,裝置關鍵部件的危險區域主要集中在部件連接處與結構突變處,整體結構變形與應力均在許用范圍內,結構設計安全合理。
五、裝載裝置整垛袋裝物料裝載試驗
(一)試驗設計
試驗在石河子大學機械電氣工程學院實訓中心開展,以裝載高度(1 m、1.5 m)、袋裝物料數量(4~12袋)、物料總重(160~480 kg)為試驗因素,以完成裝載與托盤回收的總時間為評價指標,設計18組試驗,每組重復5次取平均值。同時與傳統合力叉車(最大承載3 t)進行對比,分析裝置的效率與成本優勢。
(二)試驗過程與評價指標
裝置按“抓取-升起-旋轉-裝載-托盤回位-回收”流程作業,記錄各環節時間(抓取時間T?、轉移時間T?、裝載時間T?、托盤轉移時間T?、回收時間T?),總時間T=T?+T?+T?+T?+T?。裝載成本包括人工費用(按當地薪資25元/h計算)與設備使用成本(單次充電7度,電費1.2元/度,滿電使用30 min)。
(三)試驗結果
1. 效率表現:裝載高度1 m時,最短作業時間47.5 s;裝載高度1.5 m時,最短作業時間57.1 s,各組試驗數據標準差較小,作業穩定性良好。
2. 成本與效率對比:與傳統叉車相比,該裝置可節約裝載成本57.5%,提高裝載效率11.9%,有效驗證了其功能完整性與作業優越性。
六、結論
1. 設計的整垛袋裝物料旋轉式推進裝載裝置集成了物料裝載與托盤回收功能,通過電控系統實現自動化作業,解決了傳統裝置功能單一、效率低下的問題。
2. 靜力學仿真表明,3種核心工況下裝置最大變形量不超過25 mm,最大等效應力不超過324 MPa,均小于材料許用應力,結構安全可靠。
3. 試驗驗證顯示,裝置在不同裝載高度與物料重量下作業穩定,最短作業時間47.5 s,相比傳統叉車成本降低57.5%、效率提升11.9%,為物流行業降本增效提供了新方案。
參考文獻
[1] 喜崇彬. 制造業物流的升級優化[J]. 物流技術與應用, 2016,21(3):92.
[2] 楊守德. 技術創新驅動中國物流業跨越式高質量發展研究[J]. 中國流通經濟, 2019,33(3):62-70.
[3] 吳皓楠. 聚焦高端裝載機 雷沃工程機械全力滿足客戶需求[J]. 工程機械, 2020,51(3):7.
[4] 吳占文, 馬一民, 常淑珍, 等. 工程機械效益評價指標模型[J]. 長安大學學報(自然科學版), 2007,27(1):92-95.
[5] OMANN F L. Rock and material loading apparatus: US19960702147[P]. 1997-09-09.
[6] 李翔. 袋裝物品棚車推板式裝載裝置的虛擬設計[D]. 蘭州: 蘭州理工大學, 2013.
[7] 鄭亞波, 陳玉潔. 鐵路貨場棚車裝載裝置的研究[J]. 鐵道貨運, 2017,35(9):54-58.
[8] 李有堂, 紀憲軍. 棚車裝載運送小車轉向機構的虛擬設計[J]. 機械設計與制造工程, 2019(6):48.
[9] FAN W B. Exhaust emission characteristics of typical construction machinery and its contribution to atmospheric pollutants in Chengdu[J]. Journal of Environmental Sciences, 2023,125:761-773.
[10] 馬尚鵬. 整垛袋裝物料旋轉式推進裝載裝置的設計與研究[D]. 石河子: 石河子大學, 2024.
[11] 曲長富. 翻車機翻卸不同散裝物料對車體應力分布影響研究[D]. 大連: 大連交通大學, 2021.
[12] 李體仁, 周小琦. ANSYS和ADAMS在菌落挑取機器人結構設計中的運用[J]. 機械設計與制造, 2024(1):327-331.
[13] 李慧亮, 羅玉梅. 基于有限單元法自卸車貨箱不同工況承載分析[J]. 機械設計與制造, 2023,394(12):181-185.
[14] 干勇, 田志凌. 鋼鐵材料手冊(上)[M]. 北京: 化學工業出版社, 2009.
[15] 胡靜波, 馮月貴, 顏競峰, 等. 起重機雙折線鋼絲繩纏繞系統靜力學分析[J]. 機械制造與自動化, 2016,45(2):43-46+89.
[16] 陳炳木. 橋梁三維模型網格劃分與接觸處理的方法研究[D]. 重慶: 重慶交通大學, 2024.
[17] 閆杰, 徐莉萍, 孫富強, 等. 磨機換襯板機械臂靜力學與模態分析[J]. 礦山機械, 2021,49(3):39-42.
[18] IKUTA M, MIYANO E. Deformation of thorax under static loading: simulation analysis using finite element method[J]. Japanese Journal of Physiological Anthropology, 2004,9:163-166.
[19] 王書新, 李景林, 齊光, 等. 空間相機用爆炸螺栓防護裝置[J]. 光學精密工程, 2014,22(12):3318-3323.




