摘要:東南大學(xué)移動(dòng)通信國(guó)家重點(diǎn)實(shí)驗(yàn)室�����、紫金山實(shí)驗(yàn)室王海卜團(tuán)隊(duì)在《 電子與信息學(xué)報(bào) 》發(fā)表論文《 光學(xué)智能反射表面輔助的UAV群分布式光移動(dòng)通信 》�����。該研究針對(duì)傳統(tǒng)無人機(jī)光移動(dòng)通信(UAV-O
東南大學(xué)移動(dòng)通信國(guó)家重點(diǎn)實(shí)驗(yàn)室�����、紫金山實(shí)驗(yàn)室王海卜團(tuán)隊(duì)在《電子與信息學(xué)報(bào)》發(fā)表論文《光學(xué)智能反射表面輔助的UAV群分布式光移動(dòng)通信》。該研究針對(duì)傳統(tǒng)無人機(jī)光移動(dòng)通信(UAV-OMC)難以支持多無人機(jī)通信的痛點(diǎn)��,提出基于光學(xué)智能反射表面(OIRS)的分布式通信系統(tǒng)����,在保留高能效與高速度優(yōu)勢(shì)的同時(shí),實(shí)現(xiàn)了分布式UAV群的穩(wěn)定通信�,為無人機(jī)集群通信技術(shù)突破提供了重要支撐����。
隨著無人機(jī)技術(shù)在高空基站�����、三維測(cè)繪等領(lǐng)域的廣泛應(yīng)用,對(duì)通信速率和帶寬的需求持續(xù)攀升。光移動(dòng)通信因具備高能效����、寬帶寬特性成為優(yōu)選方案�����,但傳統(tǒng)點(diǎn)對(duì)點(diǎn)傳輸模式無法滿足多無人機(jī)協(xié)同作業(yè)的實(shí)時(shí)通信需求,而射頻通信方案又存在能效和速率不足的問題���,行業(yè)亟需新型通信技術(shù)解決方案。
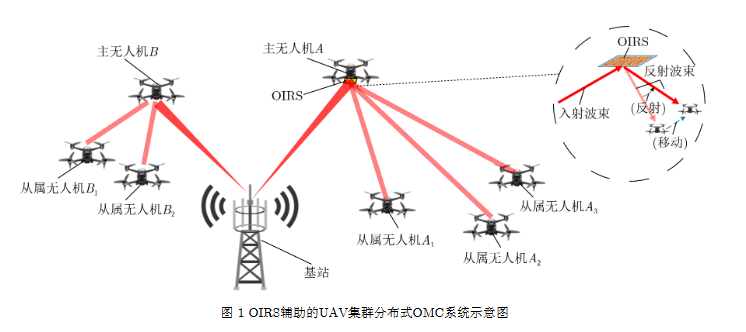
為破解這一困境���,研究團(tuán)隊(duì)創(chuàng)新性地將OIRS技術(shù)融入U(xiǎn)AV群通信系統(tǒng),通過在特定主無人機(jī)上部署OIRS設(shè)備����,利用其光束偏轉(zhuǎn)�、分裂與重構(gòu)能力�,將單一節(jié)點(diǎn)的光信號(hào)擴(kuò)散至多個(gè)從屬無人機(jī),形成以O(shè)IRS為中心的分區(qū)通信架構(gòu)。每個(gè)OIRS不僅承擔(dān)信號(hào)轉(zhuǎn)發(fā)功能�����,還能通過精準(zhǔn)的光束對(duì)準(zhǔn)與聚焦控制��,確保每個(gè)無人機(jī)節(jié)點(diǎn)都能接收穩(wěn)定信號(hào)����。
系統(tǒng)設(shè)計(jì)中��,團(tuán)隊(duì)充分考慮實(shí)際應(yīng)用場(chǎng)景�����,構(gòu)建了包含UAV相對(duì)運(yùn)動(dòng)��、設(shè)備抖動(dòng)���、高空強(qiáng)湍流等現(xiàn)實(shí)因素的數(shù)學(xué)模型�,推導(dǎo)出誤比特率(BER)和漸進(jìn)中斷概率的閉式表達(dá)式,為系統(tǒng)性能優(yōu)化提供了理論依據(jù)��。通過鏡面單元獨(dú)立控制算法��,OIRS可動(dòng)態(tài)調(diào)整光束方向�,實(shí)現(xiàn)多目標(biāo)同時(shí)服務(wù)�,靈活適配UAV群的動(dòng)態(tài)配置。
仿真測(cè)試顯示���,該系統(tǒng)在高信噪比條件下理論值與實(shí)測(cè)值高度吻合,光束對(duì)準(zhǔn)精度對(duì)通信性能的影響尤為關(guān)鍵,其作用超過惡劣天氣的干擾;當(dāng)光束校準(zhǔn)誤差控制在0.02以內(nèi)時(shí)���,系統(tǒng)性能達(dá)到最優(yōu)。此外,功率分配測(cè)試表明�����,每個(gè)主無人機(jī)搭配3個(gè)從屬無人機(jī)為最優(yōu)配置���,過多從屬節(jié)點(diǎn)會(huì)導(dǎo)致性能顯著下降�。
該研究成功解決了UAV群光通信的多節(jié)點(diǎn)接入難題,其提出的系統(tǒng)架構(gòu)與優(yōu)化方案不僅適用于無人機(jī)集群����,還可為6G光移動(dòng)通信系統(tǒng)設(shè)計(jì)提供參考���,在智能巡檢����、應(yīng)急通信等領(lǐng)域具有廣闊應(yīng)用前景��。未來團(tuán)隊(duì)將進(jìn)一步優(yōu)化網(wǎng)絡(luò)架構(gòu),推動(dòng)技術(shù)落地轉(zhuǎn)化�。
聲明:
①文獻(xiàn)來自知網(wǎng)���、維普�����、萬(wàn)方等檢索數(shù)據(jù)庫(kù),說明本文獻(xiàn)已經(jīng)發(fā)表見刊,恭喜作者.
②如果您是作者且不想本平臺(tái)展示文獻(xiàn)信息,可聯(lián)系學(xué)術(shù)顧問予以刪除.




