摘要:隨著無人機(UAV)系統的規模持續擴大以及對更高通信速率的需求增長,UAV光移動通信(UAV-OMC)已經成為一個有前景的技術方向。然而,傳統的UAV-OMC難以支持多UAV之間的通信。該文基于光學智能反
隨著無人機(UAV)系統的規模持續擴大以及對更高通信速率的需求增長,UAV光移動通信(UAV-OMC)已經成為一個有前景的技術方向。然而,傳統的UAV-OMC難以支持多UAV之間的通信。該文基于光學智能反射表面(OIRS)技術,提出一個適用于UAV群的分布式OMC系統。
通過在特定的UAV上設置OIRS,利用OIRS將光信號從單個UAV節點擴散到多個UAV節點。這一系統在保留UAV-OMC系統的高能效和高速度的同時,能夠支持分布式UAV群的通信。對所提出的系統進行了數學建模,考慮了一系列現實因素,如OIRS的光束控制、UAV之間的相對運動和UAV的抖動等,這些因素都符合實際系統的特點。此外,該文還推導出了系統的誤比特率(BER)和漸進中斷概率的閉式表達式。基于理論分析和模擬結果,討論了各個參數和系統設計的影響。
關鍵詞:光移動通信;光學智能反射表面;無人機;性能分析
論文《光學智能反射表面輔助的UAV群分布式光移動通信》發表在《電子與信息學報》,版權歸《電子與信息學報》所有。本文來自網絡平臺,僅供參考。
1 引言
隨著無人機(Unmanned Aerial Vehicle, UAV)技術的發展,人們提出了包括UAV高空基站、UAV 3維測繪等新的應用,這些應用需要更高的通信速率和更寬的帶寬[1–3]。作為一種面向移動通信場景的、具有高能效、寬帶寬和高速度特點的無線通信方式,光移動通信(Optical Mobile Communications, OMC)已成為UAV通信的一個重要發展方向[1,4]。
然而,傳統的UAV光移動通信(UAV Optical Mobile Communications, UAV-OMC)系統主要面向點對點傳輸。隨著UAV數量的增加,傳統的UAV-OMC系統難以滿足多UAV的實時高速通信需求[1–4]。因此,需要一種技術,既能保留UAV-OMC系統的高能效和高速度,又能支持多UAV通信。
光學智能反射表面(Optical Intelligent Reflecting Surface, OIRS)作為一種新型的可編程被動光通信設備,可以偏轉、分裂和重構光束[5–7]。同時,OIRS體積小、重量輕,適合安裝在UAV上。因此,基于OIRS技術,本文提出一種適用于UAV群的分布式OMC系統。在特定的UAV上設置OIRS,利用OIRS將光信號從單個UAV節點擴散到多個UAV節點。由于每個OIRS的光束分裂能力和覆蓋范圍有限,整個UAV群被劃分為以多個OIRS為中心的多個區域。每個OIRS負責特定區域內UAV的通信接入和功率分配。OIRS不僅承擔光信號轉發的功能,還執行光束對準和聚焦,以使每個UAV都能接收到一個聚焦且對準的光束。
傳統的UAV-RF系統采用射頻(Radio Frequency, RF)廣播的方式進行廣區域的信號覆蓋,以保證UAV群的通信,其通信能效和速率相比UAV-OMC更低[1,2]。與現有的UAV-OMC[8,9]不同,本系統沒有使用大直徑光束來覆蓋多個UAV,仍然在發射端使用高能效和高指向性的激光源。UAV群的信號傳輸是通過OIRS的反射實現的。因此,整個系統的能源利用效率極高。基站的光信號經OIRS重新聚焦和對準后,傳送到每個UAV。與現有的OIRS輔助OMC不同,本系統面向UAV群通信場景,且在UAV上也安裝了OIRS。因此,在設計OIRS控制方法、進行信道建模和性能分析時,本系統還需要考慮一系列現實因素,如UAV間的相對運動、OIRS光束對準和UAV抖動,這與傳統的陸地側OIRS不同[8,9]。
本文的貢獻如下:
(1) 基于OIRS技術,提出了一種OIRS輔助的UAV群分布式OMC系統。通過在特定的UAV上設置OIRS,利用OIRS將光信號從單個UAV節點擴散到多個UAV節點。這一系統在保留UAV-OMC系統的高能效和高速度的同時,能夠支持分布式UAV群的通信。
(2) 對所提出的系統進行了數學建模。在模型建立過程中,考慮了一系列現實因素,如OIRS光束控制、UAV之間的相對運動、UAV抖動和高空強湍流等,這些因素都符合實際系統的特點。
(3) 基于數學模型,分析了UAV群中后端UAV節點的通信性能,以觀察使用OIRS的UAV信號傳輸的性能可靠性。此外,還推導出了系統近似平均誤比特率(Bit Error Rate, BER)和漸進中斷概率的閉式表達式。同時,討論了影響系統性能的參數。
2 系統模型
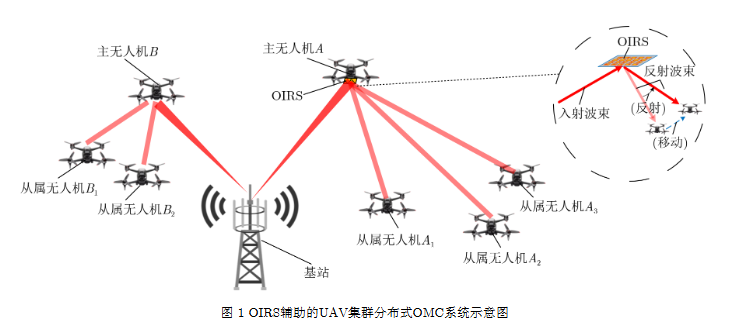
圖1是UAV群OIRS輔助分布式OMC系統的示意圖。在此系統中,基站向特定的UAV發送光信號,這個UAV可以被稱為主UAV。主UAV上的接收機位于OIRS附近,或設置在OIRS的中心,以維持主UAV的通信。主UAV上的OIRS將光信號分裂并反射到從屬UAV,進行通信。因此,在此系統中,基站只需將光束直接對準主UAV上的OIRS,進一步簡化了光束對準過程。這種UAV群OMC網絡具有進一步擴展的潛力。從屬UAV也可以裝備OIRS來分裂和重新反射接收到的光信號,從而將光信號傳輸給更多UAV。為了簡化分析和發現規律,本文僅分析在初始簡單網絡結構下UAV的通信,即只有主UAV裝備了OIRS。在復雜網絡下的UAV群OMC是這一簡單網絡的擴展。
2.1 用戶接收信號
假設該系統包含一個基站、一個主UAV和N個從屬UAV。基站向主UAV傳輸光信號。主UAV上的光學智能反射表面(OIRS)將入射光信號分裂并反射到N個從屬UAV。這里的光信號分裂是通過OIRS準確重構入射光束的光場實現的。子光束的位置和能量分布可以通過OIRS自由調整。然后從屬UAV n的接收信號可以表示為:
[r_{n}(t)=h_{n}eta _{o}mu _{n}s(t)+n_{r_{n}}=h_{s,o}h_{o,r_{n}}eta _{o}mu _{n}s(t)+n_{r_{n}}]
其中,(h_{n})表示從基站通過OIRS到從屬UAV n的信道衰落,(eta_{0})是OIRS引入的功率衰減系數,(mu_{n})是OIRS分配給從屬UAV n的功率分配系數,(s(t))是光信源發射的光信號。在此系統中,使用強度調制直接檢測(IM/DD)與開關鍵控(OOK)調制,其中(s(t)=0)或(2P_{t}),(P_{t})是信源的發射光功率。(n_{r_{n}})是從屬UAV n接收機的零均值高斯白噪聲,其方差為(sigma_{n_{r_{n}}}^{2})。(h_{s,o})表示從源到OIRS的信道衰落,(h_{o,r_{n}})表示從OIRS到從屬UAV n的信道衰落。在分析系統的信道衰落(h_{n})時,需要考慮OIRS的影響。
2.2 用于UAV通信的OIRS光束對準
當從屬UAV位于(r_{x})、(r_{y})、(r_{z})位置時,OIRS需要調整每個鏡面單元的旋轉角度,以將光束偏轉到用戶處,從而實現光束控制。假設OIRS由(I×J)個鏡面單元組成,第i行第j列的鏡面單元中心坐標為((x_{ij}, y_{ij}, z_{ij}))。其法向量的原始方向向量(h_{ij})為((h_{x_{ij}}, h_{y_{ij}}, h_{z_{ij}}))。來自基站的信號光束經過一定距離到達主UAV上的OIRS。由于光束的發散角,此時OIRS接收到一個擴散的光斑。假設入射光束的方向向量s為((s_{x}, s_{y}, s_{z})),接收機中心的坐標為((r_{x}, r_{y}, r_{z}))。這里本系統使用鏡面陣列(Mirror Array, MA)型OIRS,這種類型的OIRS被廣泛應用且適合于光束聚焦和對準。下面將基于實際物理模型推導OIRS光束聚焦和對準的相關參數表達式。
如圖2所示,展示了在UAV通信場景中OIRS光束聚焦和對準的示意圖。從圖2可以看出,基站的光束經由主UAV上的OIRS反射后,可以再次聚焦到從屬UAV上。同時,當主UAV與從屬UAV之間存在相對運動時,也可以使用OIRS來校準光束。
根據幾何關系,可以推導出第i行第j列的鏡面單元法向量在偏轉后的方向向量(h_{ij}')為:
因此,可以推導出第i行第j列的鏡面單元的偏轉角( heta_{ij})為:
同時可以推導出法向量的旋轉軸方向向量(l_{m})為:
最后可以推導出第i行第j列鏡面單元的旋轉矩陣(R_{ij})為:
基于推導出的式(4)和式(6),可以控制OIRS實現光束對準到從屬UAV。最初到達主UAV的擴散光束再次被聚焦于從屬UAV。對于多個UAV的光束分裂情況,需要進行OIRS的區域控制。本系統可以根據式(4)和式(6)的算法選擇一些鏡面單元指向某個特定的從屬UAV。同樣,其他鏡面單元的輸出光束可以指向其他從屬UAV,從而實現光束的分裂。這種方法有效利用OIRS的單元獨立控制特性,可以按需動態調整每個鏡面單元的指向,使得OIRS不僅能對單一從屬UAV進行精確的光束定向,也能同時服務于多個目標,從而拓展通信網絡的覆蓋范圍。通過這種區域控制策略,系統能夠靈活響應環境變化和UAV群的動態配置,優化整個UAV網絡的通信效率和質量。這種技術在確保每個從屬UAV都能接收到足夠的信號強度的同時,還能最大化整個系統的功率分配和利用效率。
3 系統信道建模
盡管此系統針對的是UAV群體,但其本質仍然是一個帶有激光源的OMC系統,符合OMC信道模型。系統信道衰落的主要影響因素包括指向誤差、大氣湍流和大氣衰減。這些影響因素相互獨立。因此,從屬無人機n的信道衰落(h_{n})可以表示為:
其中,(h_{l_{n}})是由大氣衰減引起的信道衰落,也稱為路徑損失;(h_{a_{n}})是由大氣湍流引起的信道衰落;(h_{p_{n}})是由指向誤差引起的信道衰落。接下來,將基于UAV群OMC的實際環境和物理模型,分別分析這個系統中的(h_{l_{n}})、(h_{a_{n}})和(h_{p_{n}})。
3.1 包含UAV相對位移的指向誤差分析與OIRS光束校準
指向誤差是指由于發射端的抖動等因素導致光束偏離接收機中心的現象,從而導致信號衰減。正如系統模型章節所提到的,在本系統中,需要使用OIRS來校準UAV之間的相對位移。然而,OIRS的光束對準仍然存在一定的誤差,這將直接影響系統的指向誤差。
假設OIRS的刷新間隔為(Delta t),從屬UAV n相對于主UAV的移動速度為(v_{n})。則從屬UAV n在OIRS刷新間隔內的位移可以表示為(d_{n}=v_{n} Delta t)。(d_{n})可以在接收端的x、y平面內分解為([d_{n_{x}}, d_{n_{y}}]),其中(d_{n_{x}}=v_{n_{x}} Delta t),(d_{n_{y}}=v_{n_{y}} Delta t)。為了將光束瞄準從屬UAV n,OIRS輸出光束的偏轉角為( heta_{o}),該偏轉角在接收平面上對應的偏轉位移為(d_{o})。(d_{o})可以在接收端的x、y平面內分解為([d_{o_{x}}, d_{o_{y}}]),并且(d_{o_{x}}= heta_{o_{x}} l_{o,r_{n}}),(d_{o_{y}}= heta_{o_{y}} l_{o,r_{n}}),其中( heta_{o_{x}})和( heta_{o_{y}})分別是( heta_{o})在x、y平面上的映射。
同時,由于OIRS設置在UAV上,UAV的抖動也導致OIRS表面的抖動。OIRS表面的抖動角度可以假設為(varphi_{o})。發射端光束的抖動角度為(varphi_{t})。(varphi_{t})和(varphi_{o})都是符合高斯分布的隨機變量。假設接收平面上的光束位移為(R=[R_{x}, R_{y}])。根據幾何關系,可以推斷出(R_{x})和(R_{y})都是符合非零均值高斯分布的隨機變量。因此,接收平面上的光束位移(R=sqrt{R_{x}^{2}+R_{y}^{2}})符合貝克曼分布,其概率密度函數(Probability Density Function, PDF)可以表示為:
其中,(sigma_{varphi_{t_{s}}})表示發射端抖動的標準差,(sigma_{varphi_{o_{s}}})表示OIRS抖動的標準差,(I_{0}(cdot))是零階的第1類修正貝塞爾函數。
根據文獻[10],當具有高斯分布的光束照射到具有孔徑半徑a的光接收機時,由指向誤差引起的信道衰落(h_{p_{n}})可以近似為:
[h_{p_{n}} approx A_{0} exp left(-frac{2 R^{2}}{omega_{z_{eq}}^{2}}
ight)]
其中,(A_{0})是在(R=0)時接收機收集到的功率的比例,(omega_{z_{eq}})是等效光束寬度。(A_{0}=[erf(z)]^{2})和(omega_{z_{eq}}^{2}=omega_{z}^{2} frac{sqrt{pi} erf(z)}{2 z exp (-z^{2})}),其中(z=sqrt{frac{pi}{2}} frac{a}{omega_{z}})是孔徑半徑與光束寬度的比率,(erf(x)=frac{2}{sqrt{pi}} int_{0}^{x} e^{-t^{2}} ~d t)是誤差函數,(omega_{z})是光束腰半徑,可以通過(omega_{z}=phi(l_{s,o}+l_{o,r_{n}}))近似計算,(phi)是光束的發散角。式(9)顯示了接收效率與光束中心偏離接收機中心的關系。如果(frac{omega_{z}}{a}>6),式(9)中的近似非常精確[10]。將式(9)代入式(8),可以推導出(h_{p_{n}})的PDF為:
3.2 大氣湍流分析
由于本系統中UAV用戶和OIRS均位于高海拔,信道湍流被建模為中到強湍流,這更符合現實情況[5,6,10,11]。對于中到強湍流條件,大氣衰落(h_{a_{n}})的PDF可以表示為[10,11]:
其中,(Gamma(cdot))是伽馬函數,而(K_{alpha_{g}-�eta_{g}}(cdot))是第二類修正貝塞爾函數,其階數為(alpha_{g}-�eta_{g})。參數(alpha_{g})和(�eta_{g})分別與小尺度和大尺度湍流有關。
3.3 大氣衰減分析
該系統使用波長為1550 nm的光信號進行通信,該波長在大氣中的衰減較少[11,12]。然而,在特殊天氣條件下,光信號的傳輸也會受到影響。在能見度為1 km的霧霾天氣下,波長1550 nm處的衰減約為3 dB/km。在本系統中,假設天氣條件的變化相對緩慢,這會帶來大尺度的信道增益。由大氣衰減引起的信道衰落(h_{l_{n}})可以表示為:
[h_{l_{n}}=10^{-frac{LTH cdot (l_{s,o}+l_{o,r_{n}})}{10}}]
其中,(LTH)表示在當前天氣條件下光信道每公里的大氣衰減,單位為dB/km,(l_{s,o})表示從光源到OIRS的距離,(l_{o,r_{n}})表示從OIRS到從屬UAV n的距離。
3.4 系統信道衰落分析
由于(h_{l_{n}})是大尺度信道衰落,系統信道衰落(h_{n})的PDF可以表示為:
將式(10)和式(11)代入式(13),可以根據文獻[13]中的有限級數近似,推導出在中到強湍流條件下(h_{n})的PDF的近似公式為:
4 系統性能分析
由于在此系統中使用強度調制/直接檢測(IM/DD)與開關鍵控(OOK)調制,系統的平均BER可以表示為[14,15]:
5 系統仿真
在本節中,將解析結果與仿真結果進行了詳細的比較。仿真基于UAV和OIRS的物理模型來搭建。在對于系統信道的仿真中,添加了獨立的發射機和UAV抖動隨機變量以及UAV隨機相對位移變量,確保與實際系統高度吻合。在仿真中,發射端模擬了(10^{8})個獨立的光信號,并在接收端使用蒙特卡羅方法統計接收到的光信號數量。然后,根據接收到的光信號數量與發送的光信號數量的比例來計算系統BER。本系統的參數如表1所示:
表1 系統參數
| 參數 | 值 |
| 光波長(λ) | 1550 nm |
| 接收機的噪聲方差((sigma_{n_{r_{n}}}^{2})) | (10^{-6}) |
| 發射端發散角度((phi)) | 6 mrad |
| 發射端抖動標準差((sigma_{varphi_{t_{s}}})) | (2×10^{-3}) |
| 從發射端到OIRS的鏈路距離((l_{s,o})) | 100 m |
| 大氣衰減系數((iota_{n})) | 0.9 |
| OIRS到從屬UAV n的鏈路距離((l_{o,r_{n}})) | 50 m |
| 接收機直徑(2a) | 20 cm |
在仿真中,主要比較了不同的OIRS抖動標準差((sigma_{varphi_{o_{s}}}))、湍流系數((sigma_{R}))、無人機光束校準精度((e_{n}))以及與主UAV的功率分配系數((mu_{n}))下系統的性能。其中,OIRS抖動標準差((sigma_{varphi_{o_{s}}}))和湍流系數((sigma_{R}))的固有參數對系統性能的影響較大。但是由于OIRS抖動在OIRS被充分固定后,難以進一步降低,因此系統設計還是需要將重心傾向易改變的光束對準精度。與OMC信道參數對系統性能的影響相比,本系統中OIRS光束校準((e_{n}))的影響也非常大。正如3.1節中所定義的,(e_{n}=sqrt{(v_{n_{x}} Delta t- heta_{o_{x}} l_{o,r_{n}})^{2}+(v_{n_{y}} Delta t- heta_{o_{y}} l_{o,r_{n}})^{2}}),其等于無人機相對運動速度與OIRS光束偏轉速度的差值。可以觀察到,在缺乏OIRS光束對準的UAV系統中,由于無人機的相對運動導致的接收光束偏移,系統性能將顯著下降,這對通信性能的影響比惡劣天氣的影響更大。同時,當(e_{n})控制在約0.02時,從屬UAV的性能相對較好。
(mu_{n})指的是主UAV的功率分配系數。當(mu_{n}=1)時,表明主UAV只向1個從屬UAV分配光信號。同時還模擬了(mu_{n}=0.5)和(mu_{n}=0.3)的情況,這分別對應于主UAV將功率分配給兩個和3個從屬UAV。從圖3可以看出,每增加1個從屬UAV,性能都會顯著下降。因此,本系統需要根據實際情況確定每個OIRS負責的從屬UAV數量。在這種模擬條件下,每個主UAV負責3個從屬UAV最為合適。當有超過3個從屬UAV時,每個從屬UAV都將難以維持通信。
6 結束語
本文提出一種OIRS輔助的UAV群分布式OMC系統,利用OIRS的光束反射和偏轉能力,使原本只能指向單個UAV的OMC鏈路得以擴展到一組UAV。同時,得益于OIRS的重新聚焦能力,位于后端的UAV仍然能夠接收到高度集中的光束。通過性能分析和仿真發現,在使用OIRS進行信號反射和傳輸時,從屬UAV仍然可以保持良好的通信性能。OIRS的光束對準能力也可以提升系統性能。然而,由于功率限制,每增加1個從屬UAV都會導致性能顯著下降。因此,需要根據實際情況確定每個OIRS負責的從屬UAV數量。未來工作將進一步設計和優化OIRS輔助的UAV-OMC網絡架構。
參考文獻
[1] 張在琛, 江浩. 智能超表面使能無人機高能效通信信道建模與傳輸機理分析[J]. 電子學報, 2023, 51(10): 2623–2634.
[2] 朱秋明, 倪浩然, 華博宇, 等. 無人機毫米波信道測量與建模研究綜述[J]. 移動通信, 2022, 46(12): 2–11.
[3] DABIRI M T, SADOUGH S M S, ANSARI I S. Tractable optical channel modeling between UAVs[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11543–11550.
[4] ZHANG Zaichen, DANG Jian, WU Liang, et al. Optical mobile communications: Principles, implementation, and performance analysis[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 471–482.
[5] NAJAFI M, SCHMAUSS B, SCHOBER R. Intelligent reflecting surfaces for free space optical communication systems[J]. IEEE Transactions on Communications, 2021, 69(9): 6134–6151.
[6] JAMALI V, AJAM H, NAJAFI M, et al. Intelligent reflecting surface assisted free-space optical communications[J]. IEEE Communications Magazine, 2021, 59(10): 57–63.
[7] WANG Haibo, ZHANG Zaichen, ZHU Bingcheng, et al. Approaches to array-type optical IRSs: Schemes and comparative analysis[J]. Journal of Lightwave Technology, 2022, 40(12): 3576–3591.
[8] MING Rui, ZHOU Zhiyan, LUO Xiwen, et al. Optical tracking system for multi-UAV clustering[J]. IEEE Sensors Journal, 2021, 21(17): 19382–19394.
[9] DABIRI M T, REZAEE M, MOHAMMADI L, et al. Modulating retroreflector based free space optical link for UAV-to-ground communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(10): 8631–8645.
[10] NATH S, SENGAR S, SHRIVASTAVA S K, et al. Impact of atmospheric turbulence, pointing error, and traffic pattern on the performance of cognitive hybrid FSO/RF system[J]. IEEE Transactions on Cognitive Communications and Networking, 2019, 5(4): 1194–1207.
[11] SANDALIDIS H G, TSIFTSIS T A, KARAGIANNIDIS G K, et al. BER performance of FSO links over strong atmospheric turbulence channels with pointing errors[J]. IEEE Communications Letters, 2008, 12(1): 44–46.
[12] IJAZ M, GHASSEMLOOY Z, PEREZ J, et al. Enhancing the atmospheric visibility and fog attenuation using a controlled FSO channel[J]. IEEE Photonics Technology Letters, 2013, 25(13): 1262–1265.
[13] WANG Zhengdao, GIANNAKIS G B. A simple and general parameterization quantifying performance in fading channels[J]. IEEE Transactions on Communications, 2003, 51(8): 1389–1398.
[14] SUN Shiyuan, WANG Tengjiao, YANG Fang, et al. Intelligent reflecting surface-aided visible light communications: Potentials and challenges[J]. IEEE Vehicular Technology Magazine, 2022, 17(1): 47–56.
[15] AJAM H, NAJAFI M, JAMALI V, et al. Modeling and design of IRS-assisted multilink FSO systems[J]. IEEE Transactions on Communications, 2022, 70(5): 3333–3349.




