摘要:摘要: 針對氣吸式玉米高速播種機(jī)導(dǎo)種過程中種子碰撞損傷和投種精度差的問題,該研究設(shè)計了一種向控輪旋撥導(dǎo)向-毛刷帶轉(zhuǎn)運(yùn)投種的毛刷帶式導(dǎo)種裝置。通過對關(guān)鍵結(jié)構(gòu)的設(shè)計和理論分析,
摘要: 針對氣吸式玉米高速播種機(jī)導(dǎo)種過程中種子碰撞損傷和投種精度差的問題,該研究設(shè)計了一種向控輪旋撥導(dǎo)向-毛刷帶轉(zhuǎn)運(yùn)投種的毛刷帶式導(dǎo)種裝置。通過對關(guān)鍵結(jié)構(gòu)的設(shè)計和理論分析,確定影響導(dǎo)種性能的主要因素和各因素取值范圍。利用Adams-EDEM耦合仿真方法進(jìn)行向控輪導(dǎo)向過程單因素試驗(yàn),結(jié)果表明:向控輪相對排種盤安裝角度為15°時,種子滿足導(dǎo)向要求且導(dǎo)向軌跡穩(wěn)定;搭建試驗(yàn)臺架,以刷毛長度、帶輪直徑為試驗(yàn)因素,粒距合格率、重播率、漏播率為試驗(yàn)指標(biāo),開展二次旋轉(zhuǎn)正交組合試驗(yàn),試驗(yàn)結(jié)果表明:在作業(yè)速度13km/h條件下、刷毛長度為25mm,帶輪直徑為53mm時,粒距合格率為96.03%,漏播率為1.76%,重播率為3.48%;根據(jù)最優(yōu)參數(shù)組合驗(yàn)證不同作業(yè)速度下導(dǎo)種裝置的性能,結(jié)果表明,當(dāng)作業(yè)速度在12~16km/h時,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破損率不高于0.19%。該研究可為玉米高速播種作業(yè)條件下導(dǎo)種裝置的設(shè)計優(yōu)化提供參考。
關(guān)鍵詞: 農(nóng)業(yè)機(jī)械;玉米;高速播種;導(dǎo)種裝置;Adams-EDEM
論文《毛刷帶式玉米高速導(dǎo)種裝置的設(shè)計與試驗(yàn)》發(fā)表在《農(nóng)業(yè)工程學(xué)報》,版權(quán)歸《農(nóng)業(yè)工程學(xué)報》所有。本文來自網(wǎng)絡(luò)平臺,僅供參考。
0 引言
玉米作為中國種植面積最廣的糧食作物,在土地集約化形勢下,搶抓農(nóng)時、適熵播種、提升單產(chǎn)等都對玉米高速精量播種提出了更高要求[1]。氣吸式精密排種技術(shù)配合約束導(dǎo)種及零速投種技術(shù)是目前高性能播種的主要發(fā)展與研究方向[2]。具備擾動充種、多級清種等技術(shù)的精密排種技術(shù)已然較為成熟可靠,但與之配合的約束導(dǎo)種,尤其是高速時種子與約束導(dǎo)種裝置碰撞導(dǎo)致種子運(yùn)移軌跡不可控,最終導(dǎo)致投種時粒距變異系數(shù)急劇增大的導(dǎo)種技術(shù)仍然是研究的重難點(diǎn)。
為了解決高速導(dǎo)種過程中種子碰撞損傷和投種精度差的問題,國內(nèi)外公司和學(xué)者主要研究設(shè)計了氣流輸送式、隔板帶式和毛刷帶式三種形式的高速導(dǎo)種裝置[3]。氣流輸送導(dǎo)種裝置,利用氣力輸送技術(shù)使種子在氣流裹挾下通過導(dǎo)種管。德國Amazone公司EDX系列播種機(jī)和英國Ferguson公司MF543型播種機(jī)采用在導(dǎo)種管內(nèi)引入正向氣流的方式,使種子在正壓氣流作用下沿導(dǎo)種管壁快速滑落,可實(shí)現(xiàn)低位投種和同步仿形[4]。劉瑞等[5]基于文丘里原理,分析氣流輸送導(dǎo)種和零速投種機(jī)理,進(jìn)一步設(shè)計確定了氣流導(dǎo)種裝置關(guān)鍵結(jié)構(gòu)參數(shù)和導(dǎo)種裝置曲線。王云霞等[6]設(shè)計了一種適用于氣流高速投種的播種機(jī)壓地裝置,通過在導(dǎo)種管后方布置壓種輪的方式減少種子在氣流加速下產(chǎn)生的落地彈跳現(xiàn)象。隔板帶式導(dǎo)種裝置利用隔板形成種腔,強(qiáng)制種子保持單粒有序運(yùn)移。美國Precision Planting公司設(shè)計了具有納種裝置的Speed Tube型輸送帶式導(dǎo)種裝置[7]。陳學(xué)庚等[8]在綜合取種盤轉(zhuǎn)速、播種機(jī)行走速度情況下,設(shè)計了一種傳動與投種機(jī)構(gòu)一體的帶式導(dǎo)種裝置。劉全威[9]提出了一種準(zhǔn)確納種、平穩(wěn)輸種和精準(zhǔn)投種的種子投送方法,設(shè)計了一種撥指同步帶式種子精確投送機(jī)構(gòu)。馬成成等[10]在撥指同步帶導(dǎo)種裝置基礎(chǔ)上,提出了一種在撥指表面添加人字形紋路的改進(jìn)方法,優(yōu)化了納種合格指數(shù)和種腔間隔變異系數(shù)。毛刷帶式導(dǎo)種裝置利用柔性刷毛與導(dǎo)種管壁對種子的運(yùn)移進(jìn)行全自由度約束。美國John Deere公司設(shè)計的Exact-Emerge毛刷帶式導(dǎo)種裝置,通過調(diào)節(jié)毛刷帶的轉(zhuǎn)速控制種子落地水平初速度可實(shí)現(xiàn)零速投種[11]。
綜上所述,氣流輸送導(dǎo)種降低了種子碰撞無序的風(fēng)險和機(jī)具振動的影響,但氣流加速下種子投出速度過大,難以平衡。隔板帶導(dǎo)種可保證播種粒距均勻分布并且可以通過調(diào)整帶的轉(zhuǎn)速保證種子投種狀態(tài),但隔板間距的限制導(dǎo)致排種器與導(dǎo)種帶的轉(zhuǎn)速調(diào)節(jié)難以適應(yīng)不同的作業(yè)速度變化。毛刷帶導(dǎo)種具有導(dǎo)種軌跡穩(wěn)定、投種速度可控和導(dǎo)種性能受外部因素影響小等特點(diǎn),但目前該裝置導(dǎo)種機(jī)理尚不明確,主要結(jié)構(gòu)參數(shù)不清晰,種子由排種器至毛刷帶的轉(zhuǎn)運(yùn)過程也有待研究。
本文在現(xiàn)有導(dǎo)種裝置研究基礎(chǔ)上,設(shè)計一種帶有向控輪輔助納種機(jī)構(gòu)的毛刷帶式導(dǎo)種裝置,確定關(guān)鍵部件的結(jié)構(gòu)及工作參數(shù),通過EDEM-Adams耦合仿真和臺架試驗(yàn)分析得到裝置最優(yōu)參數(shù)組合,并進(jìn)行不同作業(yè)速度下導(dǎo)種性能驗(yàn)證試驗(yàn)。
1 整體結(jié)構(gòu)與工作原理
1.1 整體結(jié)構(gòu)
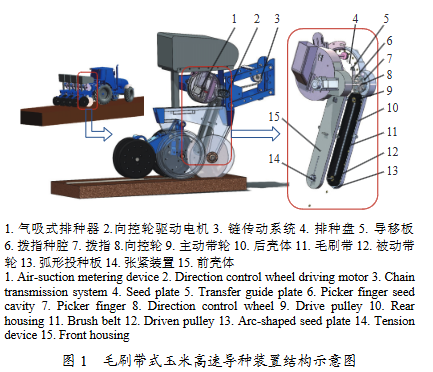
毛刷帶式導(dǎo)種裝置主要由向控輪、向控輪驅(qū)動電機(jī)、導(dǎo)移板、毛刷帶、主動帶輪、被動帶輪、鏈傳動系統(tǒng)以及裝置外殼體等部件組成,如圖1所示,主要技術(shù)參數(shù)如表1所示。裝置外殼體安裝于排種器卸種口處,向控輪、帶輪和毛刷帶內(nèi)置于殼體中,向控輪和帶輪的傳動軸通過前后殼體軸承座分別與殼體外部向控輪驅(qū)動電機(jī)和鏈傳動系統(tǒng)連接。通過調(diào)節(jié)向控輪驅(qū)動電機(jī)轉(zhuǎn)速可在更換不同吸孔數(shù)量排種盤或排種器轉(zhuǎn)速改變條件下保證向控輪與排種盤的配合關(guān)系。利用鏈傳動系統(tǒng)設(shè)置主動帶輪與機(jī)組前進(jìn)速度的固定傳動比,結(jié)合弧形投種板投種角度調(diào)節(jié),可以保證種子投出速度與作業(yè)速度大小相同,方向相反,從而實(shí)現(xiàn)零速投種。
表1 導(dǎo)種裝置主要技術(shù)參數(shù)
參數(shù) Parameters 數(shù)值 Values
外形尺寸(長×寬×高)/(mm×mm×mm) 140×55×670
排種器類型 Type of metering device 氣吸式排種器
毛刷帶長度(周長)/mm 1000
刷毛尺寸(截面直徑×長度)/(mm×mm) 0.5×25
帶輪直徑 Belt wheel diameter/mm 53
播種速度 Sowing speed/(km·h?¹) ≤16
1.2 工作原理
播種開始時,輔助納種向控輪與排種盤在各自驅(qū)動電機(jī)驅(qū)動下以固定速比相對轉(zhuǎn)動,主動帶輪由播種機(jī)地輪經(jīng)鏈傳動系統(tǒng)驅(qū)動。向控輪撥指在旋轉(zhuǎn)至籽粒脫離排種盤位置時在自身重力作用下閉合形成撥指種腔,種子隨排種盤轉(zhuǎn)過排種器負(fù)壓腔室后,掉落進(jìn)撥指種腔內(nèi),隨后在向控輪和導(dǎo)移板共同作用下排放至毛刷帶上,種子跟隨毛刷帶旋轉(zhuǎn)運(yùn)移至弧形投種板并投入到種溝內(nèi),可滿足12~16km/h的作業(yè)速度。
2 導(dǎo)種裝置結(jié)構(gòu)設(shè)計與導(dǎo)種性能分析
2.1 輔助納種機(jī)構(gòu)設(shè)計
為了提高毛刷帶納種穩(wěn)定性,設(shè)計了旋撥導(dǎo)向方式的納種輔助裝置。以向控輪旋轉(zhuǎn)過程中撥指開合形成種腔單粒裝載種子的方式對種子運(yùn)移方向進(jìn)行引導(dǎo),并在撥出時配合導(dǎo)移板使種子精準(zhǔn)投入到導(dǎo)種管運(yùn)移軌跡中,提高種子從排種盤轉(zhuǎn)運(yùn)到導(dǎo)種毛刷帶的穩(wěn)定性和精準(zhǔn)度。
輔助納種向控輪主要由向控輪主體、撥指、撥指軸組成,如圖2所示。綜合考慮氣吸式排種器排種盤卸種區(qū)位置尺寸和不干涉排種器內(nèi)部結(jié)構(gòu)正常工作前提下,設(shè)計向控輪主體最大圓周直徑為90mm。為滿足向控輪和排種盤轉(zhuǎn)速匹配,同時提高向控輪利用效率,設(shè)計撥指數(shù)量為8個,且沿向控輪圓周均勻分布,撥指和向控輪主體通過撥指軸連接。撥指軸與向控輪其上開孔過盈配合,以保證撥指軸隨向控輪固定轉(zhuǎn)動。撥指軸孔與撥指軸間隙配合,以保證撥指隨向控輪轉(zhuǎn)動在重力作用下依靠自身重力實(shí)現(xiàn)開合。向控輪與排種盤轉(zhuǎn)速配合,使得撥指開合形成撥指種腔實(shí)現(xiàn)單粒種子的納入與撥出。以常用鄭單958玉米種子為對象進(jìn)行三軸尺寸測量,得到玉米種子最大粒徑為12.6mm,為保證種子精確掉落在撥指上,設(shè)計撥指厚度為25mm,向控輪主體厚度為55mm。為防止向控輪導(dǎo)向過程中種子從撥指種腔內(nèi)提前撥出,在向控輪側(cè)邊設(shè)計導(dǎo)移板,導(dǎo)移板同時可作為排種盤清種結(jié)構(gòu)保證在排種盤轉(zhuǎn)過納種裝置時吸孔無殘留吸附種子,提高輔助納種向控輪工作穩(wěn)定性。
2.2 輔助納種機(jī)構(gòu)安裝位置與關(guān)鍵參數(shù)分析
2.2.1 向控輪充種過程
以向控輪中心為原點(diǎn)建立坐標(biāo)系,如圖3所示,對籽粒開始離開排種盤至籽粒落入種腔過程進(jìn)行運(yùn)動學(xué)分析。籽粒A為種子在種盤上失去吸附力的瞬時位置,籽粒B為種子落到撥指種腔的瞬時位置,籽粒C為下一粒種子在撥指上的落點(diǎn)位置。
籽粒A在失去氣流吸附力后,僅受自身重力和隨排種盤圓周運(yùn)動的離心力,以A籽粒中心為原點(diǎn),建立直角坐標(biāo)系。將籽粒受力和速度分別向x軸、y軸分解:
left{�egin{array}{l} F_x=F'cos�eta\ F_y=F'sin�eta+Gend{array}
ight.
left{�egin{array}{l} v_x=R_1omega_1sin�eta\ v_y=R_1omega_1cos�etaend{array}
ight.
假設(shè)籽粒從將要離開排種盤到落至撥指種腔所需時間為t:
t=frac{2pi}{n_1omega_1}=frac{2pi}{n_2omega_2}qquad(3)
式中: n_1 為排種盤吸種孔數(shù)量; n_2 為向控輪撥指數(shù)量。
在t時間內(nèi)籽粒A在x軸、y軸方向的位移量 Delta x_1、 Delta y_1 可以表示為
left{�egin{array}{l}Delta x_1=v_{1x} t+frac{a_x t^2}{2}\ Delta y_1=v_{1y} t+frac{a_y t^2}{2}end{array}
ight.
其中 left{�egin{array}{l} a_x=R_1omega_1^2cos�eta\ a_y=R_1omega_1^2sin�eta+gend{array}
ight.
式中g(shù)為重力加速度, m/s^2。
籽粒C需要在同時間t內(nèi)轉(zhuǎn)到B位置,轉(zhuǎn)過角度差 Deltaalpha 可表示為
Deltaalpha=alpha_1-alpha_2=omega_2 tqquad(6)
根據(jù)余弦定理有:
left{�egin{array}{l} L_1=sqrt{R_1^2+L^2-2 R_1 Lcos(�eta+ heta)}\ alpha_3=arccosleft(frac{L_1^2+L^2-R_1^2}{2 L_1 L}
ight)end{array}
ight.qquad(7)
化簡得:
alpha_3=arccosleft(frac{L-2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+L^2-2 R_1cos(�eta+ heta)}}
ight)qquad(8)
在圖3坐標(biāo)系下將籽粒A運(yùn)動到籽粒B的位移向x軸和y軸分解:
left{�egin{array}{l} L_1cosalpha_4-R_2cosalpha_2-Delta x_1=0\ L_1sinalpha_4-R_2sinalpha_2-Delta y_1=0end{array}
ight.qquad(9)
其中 left{�egin{array}{l}alpha_4=alpha_3+ heta\alpha_2=alpha_1-Deltaalphaend{array}
ight.
將式(4)~(8)代入式(9)可得:
left{�egin{array}{l}sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}cosleft[arccosleft(frac{L- 2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}}
ight)+ heta
ight]\ -left( R_1omega_1sin�eta t+frac{1}{2} R_1omega_1{}^2cos�eta t^2
ight)= R_2cosleft(alpha_1-omega_2 t
ight)\ sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}sinleft[arccosleft(frac{L- 2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}}
ight)+ heta
ight]\ -left( R_1omega_1cos�eta t+frac{1}{2}left( R_1omega_1{}^2sin�eta+g
ight) t^2
ight)= R_2sinleft(alpha_1-omega_2 t
ight)end{array}
ight.
為確保種子單粒順序由排種盤掉落進(jìn)向控輪撥指種腔,由式(3)可知,當(dāng)機(jī)器前進(jìn)速度確定時,排種盤和向控輪的轉(zhuǎn)動速比僅與排種盤吸種孔數(shù)量和向控輪撥指種腔數(shù)量有關(guān)。當(dāng)向控輪滿足導(dǎo)向要求時,圖3中各參數(shù)應(yīng)滿足式(11)所示關(guān)系,向控輪結(jié)構(gòu)參數(shù)確定后,L_1、 R_2 為已知量,若排種盤半徑確定,則 R_1、�eta 也可確定,此時向控輪導(dǎo)向效果受 alpha_1、alpha_2、alpha_3、alpha_4、 L、 heta 影響,又因?yàn)?alpha_1、alpha_2、alpha_3、alpha_4、 L 均隨 heta 改變而改變,所以向控輪相對排種盤的安裝角度 heta 是影響導(dǎo)向效果的主要因素。由于導(dǎo)向過程種子與向控輪的互作關(guān)系較為復(fù)雜,后文將利用仿真分析的方法對 heta 進(jìn)行確定,同時確定向控輪的安裝位置。
2.2.2 向控輪導(dǎo)向排放過程
向控輪導(dǎo)向過程種子受力分析如圖4所示,種子相對向控輪中心作圓周運(yùn)動且逐漸遠(yuǎn)離向控輪中心,種子相對撥指軸作圓周運(yùn)動且逐漸靠近撥指軸。種子在導(dǎo)向過程中僅受自身重力、向控輪轉(zhuǎn)動所施加的向心力、撥指給予的支持力和摩擦力。
種子從到達(dá)撥指理想落點(diǎn)至撥指撥出過程由能量守恒有:
lint_0^delta F_f~ddelta+Delta Rint_{R_2}^{R_3} m R^2omega_2 dR+m g h=frac{m v_2{}^2}{2}qquad(12)
其中
left{�egin{array}{l} F_f=F_nmu_1\ Delta R=R_3-R_2end{array}
ight.
式中 mu_1 為種子與撥指表面的摩擦系數(shù)。
由式(12)可知,種子在撥出時的速度 v_2 與向控輪轉(zhuǎn)速 omega_2、種子在撥指上運(yùn)動過的弧長l、種子與撥指表面的摩擦系數(shù) mu_1 有關(guān),而弧長l由撥指的彎曲弧度決定,考慮到向控輪的結(jié)構(gòu)尺寸限制,以及撥指應(yīng)能夠在撥指種腔自由開合,撥指結(jié)構(gòu)尺寸可變動范圍很小,因此種子撥出時,速度 v_2 主要由向控輪轉(zhuǎn)速 omega_2 決定。
2.3 導(dǎo)種毛刷帶設(shè)計和導(dǎo)投種機(jī)理分析
2.3.1 納種過程分析
刷管內(nèi)種子受力分析如圖5所示,刷毛與種子碰撞瞬間,假設(shè)碰撞過程中系統(tǒng)沒有機(jī)械能損失,在碰撞間隔時間內(nèi),能量傳遞滿足以下關(guān)系:
frac{1}{2} J_1omega_3{}^2-frac{1}{2} J_2omega_3^2=frac{1}{2} mleft(v_3^2-v_2{}^2
ight)qquad(14)
式中 J_1、 J_2 分別為落種前后刷毛的轉(zhuǎn)動慣量, kg/m^2; m為種子顆粒質(zhì)量, kg。
由式(14)可知,玉米種子能否精準(zhǔn)落在刷毛上并在毛刷帶和管壁共同作用下穩(wěn)定運(yùn)移,主要與種子下落時刷毛密度和刷毛長度(影響轉(zhuǎn)動慣量)以及毛刷帶的速度有關(guān),而刷毛密度除了與制作毛刷帶的工藝這一不可控因素有關(guān)之外,和帶繞帶輪的彎曲程度也有關(guān),因此帶輪的直徑可作為替代刷毛密度的可控試驗(yàn)因素。
2.3.2 運(yùn)種過程分析
刷管內(nèi)種子穩(wěn)定運(yùn)移狀態(tài)下,種子在毛刷帶作用下沿導(dǎo)種管內(nèi)壁勻速向下運(yùn)動,種子相對刷毛無滑移。由于毛刷對種子作用力受種子掉進(jìn)刷管內(nèi)的形態(tài)、種子尺寸等影響較大,且毛刷彎曲程度較為復(fù)雜,在受力分析中,僅將與種子直接接觸的刷毛分為給予種子頂端壓力和給予種子底端支持力兩部分進(jìn)行分析,如圖5所示。
受力平衡狀態(tài)下:
left{�egin{array}{l} F_{N1}singamma_1-F_{N2}singamma_2+F_msinsigma-mu_2 F_mcossigma=0\ -F_{N1}cosgamma_1+F_{N2}cosgamma_2+F_mcossigma-mu_2 F_msinsigma=Gend{array}
ight.
式中 mu_2 為種子與導(dǎo)種管內(nèi)壁的摩擦系數(shù)。
毛刷帶導(dǎo)種過程中種子與刷毛運(yùn)動狀態(tài)如圖6所示,此時刷毛幾何形狀、約束條件和受力特性與懸臂梁高度相似,同時刷毛的尼龍彈性材料符合線彈性假設(shè),適用胡克定律[12]。由于刷毛數(shù)量較多,實(shí)際使用中涉及摩擦、刷毛間的相互作用、動態(tài)載荷等問題,難以通過理論計算或有限元分析的方法進(jìn)行參數(shù)設(shè)計。因此將刷毛簡化成懸臂梁進(jìn)行分析,通過梁的計算式計算撓度、彎曲應(yīng)力等主要力學(xué)特性,從而優(yōu)化毛刷帶結(jié)構(gòu)參數(shù),保證導(dǎo)種穩(wěn)定性。
對于自由端受橫向集中力 F_N 的懸臂梁,其最大撓度 au_{max} 為
au_{max}=frac{F_N s^3}{3 E I}quad(16)
式中E為刷毛彈性模量, Pa; I為截面慣性矩, mm^4。
在刷毛狀態(tài)為小變形( aull s)假設(shè)下,刷毛末端的彎曲可近似為直線傾斜,刷毛末端切線與原軸線的夾角可表示為
gammaapprox angamma=frac{ au}{s}qquad(17)
將式(16)代入式(17):
gammaapproxfrac{F_N s^3/3 E I}{s}=frac{F_N s^2}{3 E I}qquad(18)
當(dāng)刷毛受種子作用力方向與變形后刷毛垂直時, gamma、 F_N 分別對應(yīng)于圖5中頂端刷毛的 gamma_1、 F_{N1} 和底端刷毛的 gamma_2、 F_{N2}:
left{�egin{array}{l}gamma_1=frac{F_{N1} s^2}{3 E I}\ gamma_2=frac{F_{N2} s^2}{3 E I}end{array}
ight.
將式(19)代入式(15):
left{�egin{array}{l} F_m=frac{G+F_{N1}-F_{N2}}{cossigma-mu_2sinsigma}\ frac{left(F_{N1}^2-F_{N2}^2
ight) s^2}{3 E I}=-frac{left(G+F_{N1}-F_{N2}
ight)left(sinsigma-mu_2cossigma
ight)}{cossigma-mu_2sinsigma}end{array}
ight.
撓度約束條件為
left{�egin{array}{l} F_{N1}leqslantfrac{3 E I au_{max}}{s^3}\ F_{N2}leqslantfrac{3 E I au_{max}}{s^3}end{array}
ight.
種子受刷毛作用力最大時:
F_{N1}=F_{N2}=frac{3 E I au_{max}}{s^3}quad(22)
將式(22)代入式(20),得出刷長度s下限,根據(jù)式(21)得出長度s上限,則刷毛長度取值范圍為
sqrt[3]{frac{3 E I au_{max}}{maxleft(F_{N1}, F_{N2}
ight)}}leqslant sleqslantsqrt[3]{frac{3 E I au_{max}}{minleft(F_{N1}, F_{N2}
ight)}}quad(23)
當(dāng)種子質(zhì)量為0.005 kg,彈性模量E為3 GPa,摩擦系數(shù) mu_2 為0.4,刷毛直徑選取為0.5mm,直接作用于種子的刷毛數(shù)量約20時,在允許最大撓度為0.5mm條件下,將以上參數(shù)代入式(23),計算得出刷毛長度極限:
left{�egin{array}{l} s_{max}approx 39~mm\ s_{min}approx 24~mmend{array}
ight.
選取刷毛長度因素的水平取值范圍為20~40 mm,為后文試驗(yàn)優(yōu)化提供理論依據(jù)。
2.3.3 投種過程分析
零速投種技術(shù)是指種子落入種床的瞬間相對地面速度接近于零[14]。本文設(shè)計的刷管式導(dǎo)種裝置,通過調(diào)節(jié)投種板位置使投種點(diǎn)始終位于刷管最低點(diǎn),通過調(diào)節(jié)毛刷帶的轉(zhuǎn)速使種子投下瞬間的水平速度與播種機(jī)前進(jìn)速度相近且反向,相互抵消實(shí)現(xiàn)零速投種,垂直方向上種子無速度。投種過程如圖7所示。投種瞬間種子水平方向速度有:
v_3=left(R_4+s
ight)omega_3=Vquad(25)
式中 R_4 為毛刷帶輪半徑, mm。
假設(shè)種子在毛刷管里的間距大小為k,導(dǎo)種裝置投下兩粒種子間隔時間為T:
T=frac{W}{V}=frac{k}{v_3}
k=v_3frac{2pi}{8omega_2}
將式(27)代入(26)式可得:
T=frac{W}{V}=frac{pi}{4omega_2}quad(28)
由式(28)可知,在理想工作狀態(tài)下,種子能否在給定機(jī)組工作速度下達(dá)到設(shè)定粒距僅與向控輪的轉(zhuǎn)速 omega_2 有關(guān),而與毛刷帶輪的轉(zhuǎn)速 omega_3 無關(guān)。在實(shí)際工作情況中,投種過程類似納種過程的反作用過程,因此投種效果仍與刷毛長度、帶輪直徑以及毛刷帶速度有關(guān)。為防止出現(xiàn)投種時種子卡在刷毛之間不能及時投種現(xiàn)象,應(yīng)以上述因素作為變量進(jìn)行試驗(yàn),但是為了同時滿足零速投種技術(shù)要求和設(shè)定的機(jī)組工作速度條件,實(shí)際工作中機(jī)組工作速度需要通過帶輪轉(zhuǎn)速調(diào)節(jié),因此以上三因素不可同時作為后續(xù)檢驗(yàn)導(dǎo)種性能的臺架試驗(yàn)的試驗(yàn)因素。
3 向控輪導(dǎo)向過程仿真試驗(yàn)分析
為考慮種子與輔助納種部件的相互作用,以期獲得導(dǎo)向過程種子運(yùn)動方式和軌跡,同時根據(jù)導(dǎo)種軌跡確定向控輪最佳安裝位置,利用多體動力學(xué)仿真軟件Adams與離散元仿真軟件EDEM耦合仿真方式對種子運(yùn)移路徑全面模擬[15]。
3.1 仿真模型與參數(shù)
利用Solidworks以鄭單958玉米種子為對象建模,同時將本文設(shè)計的輔助機(jī)構(gòu)簡化為向控輪主體、撥指、撥指軸、導(dǎo)移板4部分,分別導(dǎo)出種子和輔助納種機(jī)構(gòu)模型的step文件。
將種子模型step文件通過EDEM中Render Options模塊導(dǎo)入并作為種子顆粒模板進(jìn)行填充,填充平滑度設(shè)置為5時,為滿足填充率,設(shè)置填充顆粒為半徑1.18mm的球體,填充數(shù)量為116個[16]。
將輔助納種機(jī)構(gòu)模型step文件分別導(dǎo)入EDEM和Adams中,在EDEM中根據(jù)導(dǎo)入后的向控輪位置結(jié)合實(shí)際工作時向控輪納入種子時的相對位置添加顆粒工廠。在Adams中設(shè)定向控輪運(yùn)動參數(shù):導(dǎo)移板和地面之間施加固定副;向控輪主體和地面之間施加旋轉(zhuǎn)副并添加旋轉(zhuǎn)驅(qū)動;各撥指軸和向控輪主體之間分別施加固定副;各撥指和向控輪主體之間分別添加接觸力,接觸類型設(shè)定為實(shí)體對實(shí)體,法向力設(shè)定為碰撞,剛度為1x10^8 N/m,摩擦力設(shè)定為庫侖摩擦;各撥指和各撥指軸之間分別施加旋轉(zhuǎn)副;對所有耦合部件添加G-Force以實(shí)現(xiàn)EDEM中顆粒力的傳遞。
Adams中導(dǎo)出(.adm)文件,修改(.acf)命令控制文件,配置(.cosim)耦合仿真文件及環(huán)境變量,在Adams Co-simulation中加載耦合仿真文件實(shí)現(xiàn) EDEM-Adams的雙向?qū)崟r數(shù)據(jù)傳遞[17]。仿真模型如圖8所示。根據(jù)前期測量及查閱[18-22],種子和輔助納種機(jī)構(gòu)的耦合仿真參數(shù)如表2所示。
表2 耦合仿真模型參數(shù)
項(xiàng)目Items 參數(shù) Parameters 參數(shù) Parameters泊松比剪切模量/GPa 數(shù)值 Values
種子顆粒 Seed particle(SP) 密度/(kg·m?³) 1.20
泊松比 0.40
剪切模量/GPa 0.14
撥指 Picker finger(PF) 密度/(kg·m?³) 2750
泊松比 0.37
剪切模量/GPa 27.37
導(dǎo)移板 Transfer guide plate(TGP) 密度/(kg·m?³) 1330
泊松比 0.35
剪切模量/GPa 1.09
種子顆粒-種子顆粒 SP and SP 碰撞恢復(fù)系數(shù) 0.18
靜摩擦系數(shù) 0.03
動摩擦系數(shù) 0.01
種子顆粒-撥指 SP and PF 碰撞恢復(fù)系數(shù) 0.62
靜摩擦系數(shù) 0.34
動摩擦系數(shù) 0.52
種子顆粒-導(dǎo)移板 SP and TGP 碰撞恢復(fù)系數(shù) 0.71
靜摩擦系數(shù) 0.46
動摩擦系數(shù) 0.09
3.2 仿真方法
由2.2.1分析可知,向控輪相對排種盤的安裝位置由L、θ決定,且L、θ與第一個配合的撥指種腔相對向控輪中心的初始角度有關(guān),在排種器尺寸確定后,排種盤與向控輪中心連線距離L也即確定,所以旋撥導(dǎo)向效果主要由θ決定。在仿真試驗(yàn)中,通過改變顆粒工廠相對水平面的角度來模擬向控輪安裝傾角θ的變化,通過設(shè)置顆粒下落初始速度來模擬種子由排種盤落入向控輪種腔的初速度。考慮到向控輪與上方排種盤和下方毛刷管安裝配合,試驗(yàn)時分別設(shè)置θ為10°、15°、20°這3個水平,通過EDEM后處理導(dǎo)出仿真過程種子位置坐標(biāo)并繪制軌跡圖分析最佳安裝角度。
3.3 仿真結(jié)果分析
圖9為向控輪導(dǎo)向過程仿真結(jié)果,圖中坐標(biāo)系以向控輪回轉(zhuǎn)中心為原點(diǎn)建立,導(dǎo)向結(jié)束位置設(shè)置EDEM軟件中內(nèi)置的速度分布傳感器(velocity profile sensor),以監(jiān)測種子被撥出時的速度大小。為更直觀體現(xiàn)向控輪導(dǎo)向效果,導(dǎo)出在3種不同安裝角度下仿真過程中種子在X-Y平面內(nèi)的坐標(biāo)信息并導(dǎo)入到Origin軟件中繪制軌跡圖,如圖10所示。
結(jié)合2.1.1節(jié)分析,種子在撥指上的理想落點(diǎn)X軸位置為45~50mm。由圖10a可知,當(dāng)安裝角度為10°時,種子在X軸為53mm的位置下接觸到向控輪并開始導(dǎo)向,未達(dá)撥指上理想落點(diǎn);由圖10c可知,當(dāng)安裝角度為20°時種子在X軸為48mm位置下接觸到撥指并開始導(dǎo)向,滿足向控輪上理想落點(diǎn)位置要求,但由于接觸向控輪時X方向速度有所增大,會在后一撥指碰撞下彈跳導(dǎo)致導(dǎo)向軌跡不穩(wěn)定;因此,最終選擇向控輪相對排種盤安裝角度θ為15°,此時種子滿足理想落點(diǎn),并在導(dǎo)向過程中運(yùn)移軌跡穩(wěn)定。
導(dǎo)出在安裝角度為15°時仿真10s內(nèi)所有生成的種子在撥出時的速度數(shù)據(jù)并導(dǎo)入Origin軟件中制作散點(diǎn)圖,如圖11所示。種子撥出時豎直方向平均速度為0.2585m/s,水平方向的平均速度為0.3663m/s,滿足毛刷帶穩(wěn)定納種的要求。
4 臺架試驗(yàn)
4.1 試驗(yàn)材料與設(shè)備
選取鄭單958為玉米種子試驗(yàn)對象,種子形態(tài)為硬粒馬齒型[25],測定千粒質(zhì)量為307g,含水率11.9%,三軸平均尺寸7.02mm(100粒種子)。試驗(yàn)地點(diǎn)為青島農(nóng)業(yè)大學(xué)排種裝置綜合實(shí)驗(yàn)室,試驗(yàn)裝置主要由22孔氣吸式排種器、JPS-12型排種性能試驗(yàn)臺、帶有旋撥輔助納種機(jī)構(gòu)的毛刷管式導(dǎo)種裝置、計算機(jī)以及配套的電機(jī)及控制系統(tǒng)組成。其中本文設(shè)計的導(dǎo)種裝置中的輔助納種向控輪、撥指以及刷管外殼均由3D打印獲得,向控輪、撥指材質(zhì)為鋁合金,外殼材料為白色樹脂。刷管中的毛刷帶特殊定制,制作方法為確定平帶尺寸參數(shù)后在外圈表面壓膠栽毛制作。氣吸式排種器、向控輪、毛刷帶輪驅(qū)動部分分別由扭矩為110×16、57×3、110×8 N·m的步進(jìn)電機(jī)組成,排種器電機(jī)驅(qū)動器為DM3522,向控輪電機(jī)和主動帶輪電機(jī)的驅(qū)動器為DM542,控制器為CM40L三軸一體式步進(jìn)電機(jī)控制器,可同時控制三臺電機(jī)轉(zhuǎn)速調(diào)節(jié)及啟停[26-28]。試驗(yàn)時,將前期預(yù)試驗(yàn)選取的22孔排種盤氣吸式排種器和導(dǎo)種裝置固定在試驗(yàn)臺上,通過調(diào)節(jié)種床帶相對于排種器運(yùn)動速度來模擬播種機(jī)前進(jìn)運(yùn)動狀態(tài),噴油泵將油噴于種床帶上,玉米籽粒從導(dǎo)種裝置投種口落至涂有油層的種床帶上。臺架試驗(yàn)如圖12所示。
4.2 試驗(yàn)方法
根據(jù)2.3.2節(jié)理論分析和實(shí)際安裝制作要求,配合各因素可控有效范圍,選取帶輪直徑范圍為35~65mm,刷毛長度范圍為15~45mm,采用二因素五水平試驗(yàn)探究毛刷帶式導(dǎo)種裝置最佳作業(yè)性能,試驗(yàn)因素編碼如表3所示。
表3 試驗(yàn)因素編碼表
水平 Level 帶輪直徑 Pulley diameter D/mm 刷毛長度 Bristle length s/mm
-1.414 36 16
-1 40 20
0 50 30
1 60 40
1.414 64 44
作業(yè)速度設(shè)定為13km/h,標(biāo)準(zhǔn)粒距設(shè)定為20cm,根據(jù)式(3)可推算出輔助納種向控輪和排種盤轉(zhuǎn)速分別為135、49.5 r/min,根據(jù)式(28)和每組試驗(yàn)號中帶輪直徑、刷毛長度的因素值大小可計算出相應(yīng)的每個試驗(yàn)號中帶輪轉(zhuǎn)速的大小,其他參數(shù)保持恒定。根據(jù)《玉米免耕播種機(jī)作業(yè)質(zhì)量NY/T1628-2008》中對玉米播種機(jī)播種效果的要求,以粒距合格率Y?、重播率Y?、漏播率Y?為試驗(yàn)指標(biāo)[29]。試驗(yàn)時保證每組試驗(yàn)號試驗(yàn)測定籽粒的數(shù)量不低于1000粒。
left{�egin{array}{l} Y_1=frac{Q_1}{Q_0} imes 100\%\ Y_2=frac{Q_2}{Q_0} imes 100\%\ Y_3=frac{Q_3}{Q_0} imes 100\%end{array}
ight.qquad(29)
式中 Y_1 為粒距合格率,%; Q_1 為合格粒距數(shù),個; Q_0 為測定粒距總數(shù),個; Y_2 為漏播率,%; Q_2 為漏播粒距數(shù),個; Y_3 為重播率,%; Q_3 為重播粒距數(shù),個。
4.3 試驗(yàn)結(jié)果分析
試驗(yàn)方案與結(jié)果如表4所示。利用Design-Expert 13.0軟件對試驗(yàn)數(shù)據(jù)回歸分析,得出性能指標(biāo)與因素編碼值回歸方程,并檢驗(yàn)其顯著性。
表4 試驗(yàn)方案與結(jié)果
序號 No. 帶輪直徑 Pulley diameter D/mm 刷毛長度 Bristle length s/mm 粒距合格率 Qualified spacing rate Y?/% 重播率 Multiple seeding rate Y?/% 漏播率 Missed seeding rate Y?/%
1 50 30 95.5 2.4 3.1
2 50 44 92.5 2.4 7.9
3 60 20 95.3 5.4 0.8
4 36 30 90.7 2.3 7.1
5 40 20 88.6 2.6 9.5
6 40 20 94.0 2.7 4.1
7 50 16 95.8 3.5 1.1
8 64 30 95.8 4.4 0.2
9 50 30 96.5 3.3 3.6
10 50 30 95.6 2.6 2.8
11 60 40 96.2 2.9 1.6
12 50 30 94.4 2.7 3.2
13 50 30 94.7 2.7 3.6
方差分析結(jié)果如表5所示,回歸方程如式(30)所示。由表5可知,粒距合格率( Y_1 )、漏播率( Y_2 )和重播率( Y_3 )的回歸模型P值均<0.01,且失擬項(xiàng)P值均>0.05,表明三者的回歸模型均極顯著,且不存在顯著失擬問題,模型擬合度較高,能夠有效解釋響應(yīng)變量的變異規(guī)律。進(jìn)一步分析交互作用發(fā)現(xiàn),帶輪直徑(D)與刷毛長度(s)的交互項(xiàng)(D s)對 Y_1、 Y_2 和 Y_3 的影響同樣極顯著,P均<0.01,說明兩參數(shù)并非獨(dú)立作用,其交互作用對播種性能的調(diào)控具有關(guān)鍵意義。由于交互作用顯著影響了所有響應(yīng)變量,因此需結(jié)合響應(yīng)面分析法,確定D與s的最優(yōu)組合。將試驗(yàn)數(shù)據(jù)導(dǎo)入origin軟件繪制響應(yīng)曲面圖,如圖13所示。
left{�egin{array}{l} Y_1=95.340+2.010 D-1.150 s+1.580 D s-\ 1.090 D^2-0.638 s^2\ Y_2=1.300-0.083 D+0.166 s-0.006 D s+\ 0.003 D^2+0.001 s^2\ Y_3=2.995-0.090 D+0.412 s-0.012 D s+\ 0.002 D^2+0.006 s^2end{array}
ight.
4.4 響應(yīng)面分析
綜合分析各響應(yīng)曲面可以得出:當(dāng)毛刷帶輪直徑增大時,粒距合格指數(shù)增大,漏播率和重播率降低,分析其原因?yàn)榧{種過程中,帶輪直徑越大,相同刷毛密度下毛刷帶在經(jīng)過帶輪時刷毛頂端間隙張開更大,更利于種子落入刷毛中,增加納種合格率從而提高了粒距合格指數(shù)。同時三個性能指標(biāo)隨刷毛長度增大呈先增大后減小的趨勢,分析其原因?yàn)椋⒚^短或過長都會使種子在運(yùn)種過程中相對刷毛有滑移,刷管內(nèi)種子間距合格率降低。
4.5 參數(shù)優(yōu)化與驗(yàn)證
使用Design-Expert 13軟件優(yōu)化模塊優(yōu)化求解,優(yōu)化目標(biāo)函數(shù)和約束條件為
left{�egin{array}{l}max Y_1(D, s)\ min Y_2(D, s)\ min Y_3(D, s)\ ext{s.t}left{�egin{array}{l}35~mmleqslant Dleqslant 65~mm\ 15~mmleqslant sleqslant 45~mmend{array}
ight.end{array}
ight.
通過優(yōu)化求解,得出當(dāng)帶輪直徑約為53mm、刷毛長度約為25mm時,導(dǎo)種性能最優(yōu),此時對應(yīng)的粒距合格率為96.03%,漏播率為1.76%,重播率為3.48%。
4.6 導(dǎo)種性能驗(yàn)證試驗(yàn)
為驗(yàn)證設(shè)計的導(dǎo)種裝置滿足高速工作條件,在參數(shù)優(yōu)化試驗(yàn)得出的刷管最優(yōu)參數(shù)條件下,分別進(jìn)行工作速度為12、13、14、15、16km/h的臺架試驗(yàn)。此時排種盤、向控輪、毛刷帶輪的速度均可由式(3)、(25)和(28)分別計算得出,如表6所示。
表6 試驗(yàn)裝置各部分速度匹配表
工作速度 Working speed/(km·h?¹) 排種盤 Seed plate/(r·min?¹) 向控輪 Direction control wheel/(r·min?¹) 主動帶輪 Drive pulley/(r·min?¹)
12 45.5 124.9 530.5
13 49.2 135.4 574.7
14 53.0 145.8 618.9
15 56.8 156.3 663.1
16 60.6 166.7 707.4
每組速度各進(jìn)行3次試驗(yàn),取平均值,每次試驗(yàn)保證排種粒數(shù)超過1000粒,試驗(yàn)方法同上,試驗(yàn)結(jié)果如圖14所示。
由圖14可知,當(dāng)作業(yè)速度在12~16 km/h內(nèi)時,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破損率不高于0.19%,符合氣吸式高速播種機(jī)作業(yè)質(zhì)量要求。
5 結(jié)論
1)針對氣吸式玉米高速播種機(jī)導(dǎo)種過程中種子碰撞損傷和投種精度差的問題,設(shè)計了向控輪旋撥導(dǎo)向-毛刷帶轉(zhuǎn)運(yùn)投種的毛刷帶式導(dǎo)種裝置,通過對關(guān)鍵結(jié)構(gòu)的設(shè)計和理論分析,確定了影響導(dǎo)種性能的主要因素和各因素取值范圍。
2)通過EDEM-Adams軟件耦合仿真對向控輪導(dǎo)向過程中種子的運(yùn)移軌跡進(jìn)行模擬,以最佳導(dǎo)向曲線為指標(biāo),對向控輪安裝位置參數(shù)進(jìn)行優(yōu)化,結(jié)果表明:向控輪相對排種盤的安裝角度為 15^{circ} 時導(dǎo)向軌跡最優(yōu)。
3)通過臺架試驗(yàn)以粒距合格率、重播率、漏播率為試驗(yàn)指標(biāo),以刷毛長度、帶輪直徑為試驗(yàn)因素開展二次旋轉(zhuǎn)正交組合試驗(yàn),并基于Design-Expert軟件優(yōu)化試驗(yàn)參數(shù)。優(yōu)化得到毛刷帶輪直徑為53mm,刷毛長度為25mm時粒距合格率為96.03%,漏播率為1.76%,重播率為3.48%。以優(yōu)化后的結(jié)構(gòu)參數(shù)進(jìn)行作業(yè)速度驗(yàn)證試驗(yàn),試驗(yàn)結(jié)果表明:當(dāng)作業(yè)速度在12~16km/h內(nèi)時,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破損率不高于0.19%。
參考文獻(xiàn)
[1] 李少昆,趙久然,董樹亭,等. 中國玉米栽培研究進(jìn)展與展望[J]. 中國農(nóng)業(yè)科學(xué),2017,50(11): 1941-1959.
[2] 楊麗,顏丙新,張東興,等. 玉米精密播種技術(shù)研究進(jìn)展[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2016,47(11): 38-48.
[3] 廖宜濤,李成良,廖慶喜,等. 播種機(jī)導(dǎo)種技術(shù)與裝置研究進(jìn)展分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2020,51(12): 1-14.
[4] LIU R, LIU L J, LI Y J, et al. Numerical simulation of seed-Movement characteristics in new maize delivery device[J]. Agriculture, 2022, 12(11): 1944.
[5] 劉瑞,劉云強(qiáng),劉忠軍,等. 玉米高速精量播種機(jī)正壓氣流輔助吹送導(dǎo)種裝置研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2023,54(7): 156-166.
[6] 王云霞,張文毅,嚴(yán)偉,等. 氣流輔助高速投種精量播種機(jī)壓種裝置設(shè)計與試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2020,51(10): 69-76.
[7] AHMADI M. Developing a New Powered Seed Delivery System with Constant Seed Release Speed Using Two Confronting Belts[D]. North Dakota State: North Dakota State University, 2018.
[8] 陳學(xué)庚,鐘陸明. 氣吸式排種器帶式導(dǎo)種裝置的設(shè)計與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報,2012,28(22): 8-15.
[9] 劉全威. 高速播種機(jī)種子精準(zhǔn)投送機(jī)構(gòu)設(shè)計與試驗(yàn)研究[D]. 北京: 中國農(nóng)業(yè)大學(xué),2017.
[10] 馬成成,衣淑娟,陶桂香,等. 帶式玉米高速導(dǎo)種裝置旋夾納種機(jī)理分析與參數(shù)優(yōu)化[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2023,54(7): 134-143.
[11] ZHANG W Z, LIU C L, LV Z Q, et al. Optimized design and experiment on novel combination vacuum and spoon belt metering device for potato planters[J/OL]. Mathematical Problems in Engineering, 2020. DOI:10.1155/2020/1504642.
[12] 潘東彪,吳雪梅,蘇國樟,等. 滾刷式煙葉鋪平裝置刷毛參數(shù)與結(jié)構(gòu)設(shè)計[J]. 中國農(nóng)機(jī)化學(xué)報,2016,37(8): 91-95.
[13] 魏懋健. 玉米/大豆精密播種機(jī)主動毛刷輪式導(dǎo)種機(jī)構(gòu)研究[D]. 淄博: 山東理工大學(xué),2023.
[14] 佟超. 零速投種技術(shù)及其理論設(shè)計[J]. 機(jī)械研究與應(yīng)用,1995(1): 16-18, 25.
[15] 朱惠斌,吳憲,白麗珍,等. 基于EDEM-ADAMS仿真的稻茬地雙軸破茬免耕裝置研制[J]. 農(nóng)業(yè)工程學(xué)報,2022,38(19): 10-22.
[16] 王東偉,紀(jì)瑞琪,何曉寧,等. 驅(qū)導(dǎo)組合槽輔助附種氣吸式花生高速精量排種器研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2023,54(5): 59-70, 149.
[17] 李袁迪,張立強(qiáng),郭鵬程,等. 基于ADAMS的油茶嫁接機(jī)關(guān)鍵結(jié)構(gòu)設(shè)計與仿真[J]. 農(nóng)機(jī)化研究,2025,47(7): 205-212.
[18] 郭鵬,鄭效帥,王東偉,等. 氣力輔助充種式花生精量排種器設(shè)計與試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2024,55(3): 64-74.
[19] 史嵩,張東興,楊麗,等. 基于EDEM軟件的氣壓組合孔式排種器充種性能模擬與驗(yàn)證[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(3): 62-69.
[20] 金秀南,張軍昌,薛晶峰,等. 玉米種子與橡膠帶離散元接觸參數(shù)標(biāo)定[J]. 農(nóng)機(jī)化研究,2022,44(7): 39-43.
[21] 王云霞,梁志杰,張東興,等. 基于離散元的玉米種子顆粒模型種間接觸參數(shù)標(biāo)定[J]. 農(nóng)業(yè)工程學(xué)報,2016,32(22): 36-42.
[22] 崔濤,劉佳,楊麗,等. 基于高速攝像的玉米種子滾動摩擦特性試驗(yàn)與仿真[J]. 農(nóng)業(yè)工程學(xué)報,2013,29(15): 34-41.
[23] 陳立東. 氣吸式排種器性能參數(shù)設(shè)計及其對排種質(zhì)量影響的試驗(yàn)研究[D]. 大慶: 黑龍江八一農(nóng)墾大學(xué),2006.
[24] MARKAUSKAS D, RAMIREZ-GMEZ A, KACIANAUS-KAS R, et al. Maize grain shape approaches for DEM modelling[J]. Computers and Electronics in Agriculture, 2015, 118: 247-258.
[25] 陳棟泉,李國瑩,曹潘冬,等. 基于EDEM仿真玉米高位投種結(jié)構(gòu)參數(shù)分析與試驗(yàn)[J]. 農(nóng)機(jī)化研究,2024,46(2): 31-37.
[26] 衣淑娟,李怡凱,陳繼國,等. 俯仰式播種單體仿形性能檢測試驗(yàn)臺設(shè)計與試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2024,55(2): 90-100.
[27] 王淞,趙斌,衣淑娟,等. 基于IGWO-LADRC的電動綠豆播種機(jī)控制系統(tǒng)研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2022,53(S1): 87-98.
[28] 趙碩,宗澤,劉剛. 基于電機(jī)驅(qū)動的定位施肥控制系統(tǒng)設(shè)計與試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2019,50(S1): 91-95, 114.
[29] 中華人民共和國農(nóng)業(yè)農(nóng)村部. 玉米免耕播種機(jī)作業(yè)質(zhì)量: NY/T 1628-2008[S]. 北京: 中國農(nóng)業(yè)出版社,2008.




