摘要:摘要:南水北調(diào)中線工程小流量�、低流速的冬季冰期輸水模式有利于形成平封冰蓋,但卻大大降低了輸水能力�,影響了工程效益���。本文研究旨在保證工程安全運(yùn)行的前提下盡可能維持冬季常規(guī)
摘要:南水北調(diào)中線工程小流量、低流速的冬季冰期輸水模式有利于形成平封冰蓋�����,但卻大大降低了輸水能力�����,影響了工程效益�����。本文研究旨在保證工程安全運(yùn)行的前提下盡可能維持冬季常規(guī)輸水工況,必要時(shí)再緊急切換至冰期輸水模式,盡可能縮短形成冰蓋下輸水條件的入冬過渡期時(shí)間。為此��,基于ID模型和水位偏差目標(biāo)值計(jì)算式建立輸水渠系狀態(tài)空間方程��,修改目標(biāo)函數(shù)�,實(shí)現(xiàn)目標(biāo)水位的實(shí)時(shí)更新��,并對(duì)模型預(yù)測(cè)控制算法進(jìn)行了初步改進(jìn)�。將其應(yīng)用于京石段的13個(gè)渠池�����,結(jié)果表明:在大流量變化工況下��,相較于下游常水位運(yùn)行的PID控制結(jié)果���,水位提前35h達(dá)到穩(wěn)定狀態(tài)�����,過渡期縮減34%;渠道流量從設(shè)計(jì)流量的79%線性減小到40%時(shí)���,各渠池目標(biāo)水位變化范圍在0~0.078m之間����,滿足工程運(yùn)行要求的水位變幅,高水位的運(yùn)行狀態(tài)有利于實(shí)現(xiàn)冰期安全輸水。本研究能在動(dòng)態(tài)性能不顯著下降的前提下更快完成冰期應(yīng)急過渡�����,在一定程度上提高冬季輸水效益��。
關(guān)鍵詞:控制蓄量;模型預(yù)測(cè)控制;南水北調(diào)中線;動(dòng)態(tài)目標(biāo)水位;下游常水位
論文《南水北調(diào)中線工程冬季輸水動(dòng)態(tài)目標(biāo)水位控制算法研究》發(fā)表在《水利學(xué)報(bào)》�����,版權(quán)歸《水利學(xué)報(bào)》所有。本文來自網(wǎng)絡(luò)平臺(tái)����,僅供參考�����。
1 研究背景
南水北調(diào)中線工程跨越北緯33°~40°,自丹江口水庫(kù)陶岔渠首閘引水�����,沿途分別向河南�����、河北、天津��、北京供水�,目前已成為受水區(qū)的主力水源[1]。由于中線工程距離長(zhǎng)���、跨度廣,大多采用混凝土襯砌明渠[2]��,冬季輸水渠沿程氣溫降低�,結(jié)冰范圍增加,嚴(yán)重降低輸水能力;部分建筑物由于凍脹破壞無法正常工作;渠道斷面變化處可能出現(xiàn)冰塞����、冰壩等[3]���。為保障冰期輸水高效安全運(yùn)行�,中線工程在現(xiàn)有調(diào)度規(guī)則下制定了冬季輸水模式�,即采用小流量、大水深��,形成冰蓋下輸水模式��。冬季渠系調(diào)度也分為5個(gè)階段:入冬過渡期��、初封期、穩(wěn)封期����、融冰期�、出冬過渡期��。其中入冬過渡期是根據(jù)天氣預(yù)報(bào)減少渠道輸水流量至平封流量的階段��,該過程要求在初冰時(shí)間之前達(dá)到平封條件,其運(yùn)行控制十分關(guān)鍵�,決定了冰花聚集是形成冰蓋還是冰塞��。
根據(jù)前期調(diào)研,安陽以北渠池冬季輸水流量?jī)H為設(shè)計(jì)流量的30%~47%[4],在此模式下,下游段渠道過流能力大幅降低[5]。在確保中線工程安全平穩(wěn)運(yùn)行的前提下���,如何挖掘提升冬季輸水能力成為研究熱點(diǎn)[6-9]?��,F(xiàn)有可靠的冰情預(yù)報(bào)數(shù)據(jù)為3~5d,為了形成穩(wěn)定的平封冰蓋�,需提前足夠時(shí)間調(diào)整至冰期運(yùn)行模式���??紤]到工程效益和安全兩方面因素�,需要對(duì)常規(guī)輸水和冰期輸水的過渡過程進(jìn)行重點(diǎn)把控,如果切換過程快速且穩(wěn)定�����,可以增加常規(guī)運(yùn)行時(shí)間以提高輸水量��,同時(shí)控制渠道水流指標(biāo)����,保障冰期輸水條件�。以安陽倒虹吸節(jié)制閘為例,僅縮短冰期輸水5天時(shí)間�����,就能增加5788.8萬m³的水量[10]�,表明從時(shí)間上挖掘冬季輸水潛力是可行的。這就要求冬季盡可能維持常規(guī)輸水模式,以大流量持續(xù)調(diào)水����,應(yīng)急工況下再切換至冰期輸水模式���,對(duì)過渡期的切換效率提出了很大挑戰(zhàn)���。
2 算法原理
2.1 明渠運(yùn)行方式
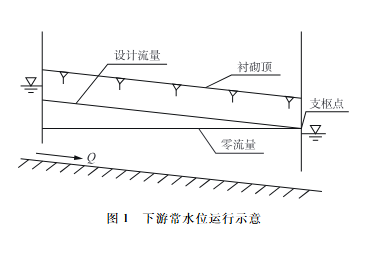
當(dāng)前中線采用的下游常水位運(yùn)行方式如圖1所示���,以下游端水深不變?yōu)榭刂颇繕?biāo),水面線繞支樞點(diǎn)轉(zhuǎn)動(dòng)。穩(wěn)定狀態(tài)下的水面線低于設(shè)計(jì)流量水面線��,可以減小渠道襯砌超高���,進(jìn)而減少工程土方量����。但在取水口流量增加時(shí),渠池蓄量減少導(dǎo)致下游水位降低,為使水位恢復(fù)到目標(biāo)水位,需要增大人流流量以補(bǔ)充蓄量,反之亦然[27]。這種運(yùn)行方式下蓄量的變化與自然趨勢(shì)相反����,導(dǎo)致響應(yīng)速度較慢��、趨穩(wěn)時(shí)間較長(zhǎng)。
控制蓄量運(yùn)行下水位支樞點(diǎn)并不固定�,水面可以上升或下降���,主要受水位波動(dòng)范圍限制����,如圖2所示���。在流量改變時(shí)����,其需要改變的蓄量大小相較于相同工況下的常水位運(yùn)行方式更小,可以明顯縮短過渡時(shí)間?�?刂菩盍糠ㄓ挚煞譃橹苯涌刂坪烷g接控制兩類:直接控制是以渠池水體積為控制對(duì)象�,根據(jù)實(shí)際體積與目標(biāo)體積之差控制閘門;間接控制是通過控制水位使渠池蓄水體積達(dá)到目標(biāo)值[28]。本文選擇建立流量與水位的關(guān)系,通過改變下游目標(biāo)水位實(shí)現(xiàn)間接控制蓄量運(yùn)行�。
2.2 MPC基本原理
模型預(yù)測(cè)控制是當(dāng)前應(yīng)用最為廣泛的現(xiàn)代控制算法之一���,基于明渠系統(tǒng)的簡(jiǎn)化控制模型對(duì)系統(tǒng)的未來輸出動(dòng)作(流量或閘門)進(jìn)行求解��,從而得到最優(yōu)控制動(dòng)作序列�。相較于PID控制和LQR控制,預(yù)測(cè)控制算法可以對(duì)未來一定時(shí)域內(nèi)的響應(yīng)進(jìn)行預(yù)測(cè)���,同時(shí)采用有限時(shí)域的目標(biāo)函數(shù)進(jìn)行動(dòng)作變量求解,得到可行解后提前執(zhí)行控制動(dòng)作���,起到前饋加反饋的作用效果[29]����。算法主要由預(yù)測(cè)模型�����、目標(biāo)函數(shù)�����、約束和滾動(dòng)優(yōu)化四部分組成。
其中開環(huán)最重要的部分是預(yù)測(cè)模型�����,使用最廣泛的是Schuurmans等[30]提出的積分延遲模型(Integrator-Delay, ID)�����,他對(duì)圣維南方程組在初始穩(wěn)態(tài)附近進(jìn)行線性化假設(shè)和拉氏變換��,將單個(gè)渠池概化為均勻流區(qū)和回水區(qū)[31],其水力特性描述如下:
fractl7lrfpl{d t} e(t)=frac{1}{A_{s}}left[q_i(t- au)-q_{i+1}(t)-d(t)
ight]
式中:e(t)為t時(shí)刻下游水深相對(duì)于初始水深的增量�����,m;q_i(t- au)為t- au時(shí)刻渠池人流相對(duì)于初始人流流量的增量�,m³/s;q_{i+1}(t)為t時(shí)刻渠池出流相對(duì)于初始出流流量的增量��,m³/s;d(t)為t時(shí)刻渠池分水口流量相對(duì)于初始分水口流量的增量��,m³/s;A_s為回水面積,m²; au為滯后時(shí)間�,s���。
2.3 動(dòng)態(tài)目標(biāo)策略
對(duì)于南水北調(diào)中線這樣的大型工程而言����,入冬過渡期需要在短時(shí)間內(nèi)減小流量至平封流量���,在采用固定目標(biāo)水位時(shí)��,需要耗費(fèi)大量時(shí)間恢復(fù)至初始狀態(tài)���,延長(zhǎng)滾動(dòng)優(yōu)化進(jìn)程����。由于冬季輸水時(shí)間通常僅3個(gè)月�,這段時(shí)間內(nèi)可以不必保持常規(guī)的目標(biāo)水位,而是根據(jù)進(jìn)出口流量實(shí)時(shí)計(jì)算新的目標(biāo)水位值����,實(shí)現(xiàn)間接控制蓄量運(yùn)行���,以此提高過渡期的切換效率���。冰期結(jié)束后再逐步調(diào)整至常規(guī)運(yùn)行的目標(biāo)水位值����,保證工程安全運(yùn)行�����。這種控制蓄量與下游常水位運(yùn)行結(jié)合的方式,可以在流量大幅調(diào)整階段將蓄量分配至每個(gè)渠池,從而加速入冬過渡期的穩(wěn)定�。
MPC的目標(biāo)函數(shù)通常是預(yù)測(cè)范圍內(nèi)的系統(tǒng)輸出誤差和控制范圍內(nèi)的未來控制動(dòng)作的平方和����,在明渠系統(tǒng)中�,其控制目標(biāo)形式如下:
J=sum_{i=1}^{N}left(sum_{j=1}^{p}left(Q_{i, j}left(e_{i}(k+j mid k)-e_{r, i}(k+j mid k)
ight)
ight)^{2}+sum_{j=1}^{m}left(R_{i, j} u_{i}(k+j-1 mid k)
ight)^{2}
ight)
式中:e_i(k+jk)為在第k步預(yù)測(cè)未來第k+j步第i個(gè)渠池水位與目標(biāo)水位的偏差值,m;e_{r,i}(k+j k)為在第k步制定的未來第k+j步第i個(gè)渠池水位與目標(biāo)水位的偏差目標(biāo)值���,m;$u_i(k+j-1
k)為在第k步制定的未來第k+j-1步第i個(gè)渠池的進(jìn)口流量變化量�,m³/s;Q_{i,j}和R_{i,j}分別為系統(tǒng)水位偏差和控制輸入的權(quán)重值;p為預(yù)測(cè)時(shí)域;m為控制時(shí)域;N$為渠池?cái)?shù)���。
在控制蓄量運(yùn)行方式下�����,水位偏差的目標(biāo)值e_{r,i}(k+j|k)可以不為0�����,其值需要建立流量與水位的關(guān)系。根據(jù)水面面積和水位限值�,計(jì)算出每個(gè)渠池的可調(diào)蓄量���,進(jìn)而將流量差產(chǎn)生的蓄量按權(quán)重分配到各個(gè)渠池�����,在每個(gè)時(shí)間步計(jì)算出各個(gè)渠池的水位偏差目標(biāo)值,計(jì)算形式如下:
e_{r, i}(k)=e_{r, i}(k-1)+frac{T_cleft(Q_{ ext {in }}(k)-sum_{j=1}^{n} Q_{ ext {offtake }, j}(k)
ight)}{sum_{i=1}^{N}left(A_i L_i(k)
ight)} L_i(k)
式中:e_{r,i}(k)為第i號(hào)渠池第k步水位偏差目標(biāo)值����,初始時(shí)刻為0,m;T_c為控制步長(zhǎng)���,s;Q_{in}(k)為第k步渠道上游進(jìn)口流量,m³/s;Q_{ ext{offtake},j}(k)為第k步第j個(gè)取水口的流量��,m³/s;A_i為第i號(hào)渠池的水面面積�,m²;L_i(k)為第k步第i號(hào)渠池水位與上限或下限水位之差的最小值,m;n為取水口數(shù)目����。
2.4 基于模型預(yù)測(cè)控制的動(dòng)態(tài)目標(biāo)策略
基于ID模型和水位偏差目標(biāo)值計(jì)算式構(gòu)建輸水渠系的狀態(tài)空間方程����,將原先已知的參考軌跡修改為與流量有關(guān)的表達(dá)式�,基于狀態(tài)量與目標(biāo)值間的差異對(duì)閘門控制動(dòng)作進(jìn)行優(yōu)化求解。
假設(shè)某一渠池的滯后步長(zhǎng)k_{ au_{i,d}}=3,則可構(gòu)建形如式(4)-(6)的單渠池狀態(tài)空間方程:
式中�����,q_1(k)為第k步最上游渠池進(jìn)口流量變化量�����,m³/s;d_{ ext{off}}(k)為所有渠池取水口流量變化量之和���,m³/s;c_i為參數(shù)���,c_i = frac{T_c L_i(k)}{sum_{i=1}^{N}(A_i L_i(k))}�。
將e_i(k)記為輸出變量y(k)���,e_i(k)�����、q_i(k-3)、q_i(k-2)�、q_i(k-1)�����、e_{r,i}(k)記為狀態(tài)變量x(k),q_i(k)記為控制變量U(k)���,d_i(k)記為擾動(dòng)變量d(k),則通過遞推可以得到未來預(yù)測(cè)時(shí)域內(nèi)明渠系統(tǒng)的水位偏差輸出量��,將其寫為矩陣形式���,如下所示:
Y(k+1 mid k)=M_x x(k)+M_u U(k)+M_d D(k)
式中:$Y(k+1k)=[y(k+1 k), y(k+2 k), cdots, y(k+p
k)]^T;U(k)=[u(k), u(k+1), cdots, u(k+m-1)]^T;D(k)=[d(k), d(k+1), cdots, d(k+p-1)]^T;M_x�����、M_u��、M_d$為系數(shù)矩陣�。
類似地�����,可以得到水位偏差目標(biāo)值輸出矩陣Y_r(k+1|k)��。將模型預(yù)測(cè)輸出表達(dá)式代入目標(biāo)函數(shù),整理后轉(zhuǎn)化為二次規(guī)劃問題求解�����,得到k時(shí)刻的最優(yōu)控制序列后僅執(zhí)行第一個(gè)控制動(dòng)作��,然后滾動(dòng)優(yōu)化�����。
3 算法仿真驗(yàn)證及討論
3.1 目標(biāo)渠系概況
以南水北調(diào)中線京石段(古運(yùn)河暗渠節(jié)制閘至北拒馬河節(jié)制閘)為例���,該渠段全長(zhǎng)225km����,由節(jié)制閘劃分為13個(gè)渠池,考慮24個(gè)分水閘和退水閘��。各渠池基本參數(shù)見表1���。假定目標(biāo)水深可以在上下限水深內(nèi)變化��,即在渠道允許范圍內(nèi)蓄泄水量�����。渠池最下游端流量固定不變,通過施加分水?dāng)_動(dòng)探究方法的有效性�����。
表1 渠道基本參數(shù)
單位:m
渠池號(hào) 1 2 3 4 5 6 7 8 9 10 11 12 13
目標(biāo)水深 6.0 5.0 5.0 5.0 5.0 4.5 4.5 4.5 4.5 4.5 4.3 4.3 4.3
水深上限值 6.4 5.4 5.4 5.5 5.5 5.0 5.1 5.1 5.0 4.8 4.6 4.5 4.4
水深下限值 5.5 4.5 4.5 4.5 4.5 4.2 4.2 4.2 4.2 4.2 4.1 4.1 4.1
3.2 工況設(shè)置
分別設(shè)置分水口大���、小流量變化兩種工況:
1. 大流量變化工況:渠首流量由設(shè)計(jì)流量的79%線性減小到40%��,多個(gè)渠池同時(shí)發(fā)生擾動(dòng)�,對(duì)應(yīng)于冰期緊急過渡情況����。
2. 小流量變化工況:僅渠池9的分水流量發(fā)生階躍上升,渠首流量由設(shè)計(jì)流量的74%增加到79%,對(duì)應(yīng)于常規(guī)輸水?dāng)_動(dòng)工況��。
具體參數(shù)及擾動(dòng)設(shè)置見表2�。
表2 仿真參數(shù)及擾動(dòng)工況設(shè)置
渠池號(hào) Q_s/(m³/s) R 大流量變化 小流量變化
分水流量變化/(m³/s) 擾動(dòng)起止時(shí)間/h 分水流量變化/(m³/s) 擾動(dòng)起止時(shí)間/h
1 135 20→10 40→50 0→0 20→20
2 115 15→9 40→50 7→7 20→20
13 30 0→0 40→50 7→7 20→20
下游流量 30 m³/s 35 m³/s
注:Q_s為各渠池的上游初始流量;R為各渠池的流量懲罰權(quán)重��。
設(shè)置四種計(jì)算方案進(jìn)行比較驗(yàn)證��,見表3。
表3 計(jì)算方案設(shè)置
方案設(shè)置 大流量變化工況 小流量變化工況
方案一 方案二 方案三 方案四
控制算法 控制蓄量法-MPC 下游常水位-PID 控制蓄量法-MPC 水位軟約束-MPC
3.3 控制性能指標(biāo)
選取最大超調(diào)量sigma_p、穩(wěn)定時(shí)長(zhǎng)S_t和無量綱化水位誤差平方積分NISE三個(gè)性能指標(biāo)對(duì)結(jié)果進(jìn)行分析說明。
3.4 結(jié)果分析
大流量變化工況(方案一 vs 方案二):
• 趨穩(wěn)時(shí)間:方案一(控制蓄量法-MPC)的水位提前約35小時(shí)達(dá)到穩(wěn)定狀態(tài),過渡期縮減了34%。
• 水位變化:方案一中,由于MPC算法預(yù)測(cè)到未來擾動(dòng)并提前采取動(dòng)作�����,部分渠池水位先明顯下降�,后逐步趨于(新的)目標(biāo)水位。方案二中,PID算法在擾動(dòng)發(fā)生后才調(diào)整,下游水位呈先升后降的相反變化趨勢(shì)��。
• 目標(biāo)水位變幅:各渠池目標(biāo)水位變化范圍在0~0.078m之間��,滿足工程運(yùn)行要求(±0.15m)���。高水位運(yùn)行有利于形成平封冰蓋�。
小流量變化工況(方案三 vs 方案四):
• 方案三(本方法)的趨穩(wěn)時(shí)間較方案四(水位軟約束-MPC)縮短了41小時(shí)�,提升效果達(dá)54%。
• 方案四允許水位在目標(biāo)帶內(nèi)自由變化,對(duì)小幅偏差不響應(yīng)���,故水位變化頻繁且在仿真結(jié)束時(shí)未完全穩(wěn)定。方案三的整體過渡過程更加平穩(wěn)�。
表4 仿真結(jié)果統(tǒng)計(jì)
方案 sigma_p/m S_t/h NISE 方案 sigma_p/m S_t/h NISE
方案一 -0.29 67 6.35×10?? 方案三 0.2545 35 1.95×10??
方案二 0.21 102 7.75×10?? 方案四 -0.15 >76 5.39×10??
改善程度 -38% 34% 18% 改善程度 -69.7% 54% -261%
注:改善程度指方案一相較于方案二����、方案三相較于方案四的變化百分比(負(fù)值表示指標(biāo)變差)。
4 討論
本文提出的基于MPC算法的控制蓄量方法,通過使目標(biāo)水位朝著水位變化趨勢(shì)方向移動(dòng),減小實(shí)際水位與目標(biāo)水位的偏差�,達(dá)到了快速恢復(fù)穩(wěn)定的效果��。這需要在擾動(dòng)發(fā)生前就提前改變上游流量,導(dǎo)致擾動(dòng)較大的渠池出現(xiàn)了水位超調(diào)增大的現(xiàn)象,但均未超過渠道最高水位�。相比之下�����,PID算法更為保守,水位軟約束法則能較好地將水位控制在目標(biāo)帶內(nèi),但過渡過程可能更長(zhǎng)或更頻繁�����。
由于南水北調(diào)中線工程已成為受水區(qū)主力水源����,無法停水進(jìn)行實(shí)地試驗(yàn)����,故本研究通過與其他成熟算法(PID、水位軟約束MPC)的仿真對(duì)比,從變化規(guī)律和性能指標(biāo)上驗(yàn)證了所提方法的有效性。
5 結(jié)論
1. 本研究提出了基于模型預(yù)測(cè)控制的動(dòng)態(tài)目標(biāo)水位控制算法,通過建立水位偏差目標(biāo)與流量的關(guān)系式���,將水位偏差目標(biāo)值作為狀態(tài)量加入狀態(tài)空間方程,實(shí)現(xiàn)了目標(biāo)水位的實(shí)時(shí)動(dòng)態(tài)更新��。
2. 將該算法應(yīng)用于南水北調(diào)中線京石段13個(gè)渠池的仿真表明�����,在大�����、小兩類流量變化工況下,系統(tǒng)水位趨穩(wěn)時(shí)間分別縮短了35小時(shí)和41小時(shí)���,能滿足冰期應(yīng)急快速過渡的需求。
3. 在大流量減小工況下���,各渠池目標(biāo)水位變化范圍在0~0.078m之間,滿足工程運(yùn)行要求��,且高水位運(yùn)行有利于冰期安全輸水�����。
4. 該方法雖然在一定程度上增大了水位最大變幅,但整體過渡更加穩(wěn)定���。在保證工程安全的前提下,能夠提高冬季輸水效益�����。
后續(xù)工作將考慮增大研究范圍�,對(duì)多個(gè)渠池進(jìn)行分組優(yōu)化控制,并探索下游常水位與動(dòng)態(tài)目標(biāo)水位結(jié)合的混合運(yùn)行方式��,以實(shí)現(xiàn)工程效益與安全的最大化�。
參考文獻(xiàn)
[1] 李景剛, 陳曉楠, 盧明龍, 等. 南水北調(diào)中線干線冰期輸水動(dòng)態(tài)調(diào)度初探[J]. 中國(guó)水利, 2023(2): 30-33.
[2] 楊開林. 冰期明渠水溫模型[J]. 水利學(xué)報(bào), 2022, 53(1): 20-30.
[3] 劉國(guó)強(qiáng). 長(zhǎng)距離輸水渠系冬季輸水過渡過程及控制研究[D]. 武漢: 武漢大學(xué), 2014.
[4] 郭新蕾, 潘佳佳, 苑希民, 等. 南水北調(diào)中線冬季冰情變化特征及輸水能力提升策略研究[J]. 水利學(xué)報(bào), 2024, 55(4): 389-402.
[5] 陳曉楠, 李景剛, 盧明龍, 等. 南水北調(diào)中線總干渠冰期輸水運(yùn)行實(shí)踐分析[J]. 人民長(zhǎng)江, 2023, 54(12): 254-259.
[6] 潘佳佳, 郭新蕾, 王濤, 等. 基于全氣象參數(shù)的南水北調(diào)中線冬季水氣熱交換模型[J]. 水利學(xué)報(bào), 2024, 55(2): 179-189, 201.
[7] 付輝, 郭新蕾, 楊開林, 等. 南水北調(diào)中線工程典型倒虹吸進(jìn)口上游垂向流速分布[J]. 水科學(xué)進(jìn)展, 2017, 28(6): 922-929.
[8] 付輝, 楊開林, 郭永鑫, 等. 南水北調(diào)典型倒虹吸防冰塞安全運(yùn)行試驗(yàn)[J]. 水科學(xué)進(jìn)展, 2013, 24(5): 736-740.
[9] 高霈生, 靳國(guó)厚, 呂斌秀. 南水北調(diào)中線工程輸水冰情的初步分析[J]. 水利學(xué)報(bào), 2003(11): 96-101, 106.
[10] 程德虎, 郝澤嘉, 楊金波. 南水北調(diào)中線典型冰情特征及提升冬季輸水能力思路研究[C]//中國(guó)水利學(xué)會(huì)2019學(xué)術(shù)年會(huì). 宜昌, 2019.
[11] 丁志良, 王長(zhǎng)德, 談廣鳴, 等. 渠系蓄量補(bǔ)償下游常水位運(yùn)行方式研究[J]. 應(yīng)用基礎(chǔ)與工程科學(xué)學(xué)報(bào), 2011, 19(5): 700-711.
[12] YEH W W-G, GRAVES A L, TOY D, et al. Central arizona project: operations model[J]. Journal of the Water Resources Planning and Management Division, 1980, 106(2): 521-540.
[13] 姚雄, 王長(zhǎng)德, 李長(zhǎng)菁. 基于控制蓄量的渠系運(yùn)行控制方式[J]. 水利學(xué)報(bào), 2008, 39(6): 733-738.
[14] 方神光, 吳保生. 南水北調(diào)中線干渠閘前變水位運(yùn)行方式探討[J]. 水動(dòng)力學(xué)研究與進(jìn)展(A輯), 2007(5): 633-639.
[15] 鐘錁, 管光華, 廖文俊, 等. 基于渠池蓄量平衡的閘前變目標(biāo)水位算法[J]. 排灌機(jī)械工程學(xué)報(bào), 2018, 36(9): 857-862.
[16] 管光華, 李慧瀅, 蘇海旺, 等. 串聯(lián)渠系多渠池蓄量平衡控制模式研究[J]. 灌溉排水學(xué)報(bào), 2021, 40(2): 84-92.
[17] GUAN G, CLEMMENS A J, KACEREK T F, et al. Applying water-level difference control to central arizona project[J]. Journal of Irrigation and Drainage Engineering, 2011, 137(12): 747-753.
[18] CLEMMENS A J. Water-level difference controller for main canals[J]. Journal of Irrigation and Drainage Engineering, 2012, 138(1): 1-8.
[19] KONG L, SONG P, JI Q, et al. Water level predictive control in multi-cascade pools with large control interval demand based on constraint methods[J]. Journal of Hydrology, 2021, 603: 127024.
[20] 孔令仲, 王浩, 雷曉輝, 等. 基于線性預(yù)測(cè)控制算法的明渠實(shí)時(shí)控制研究[J]. 水利學(xué)報(bào), 2020, 51(3): 326-334.
[21] 王忠靜, 鄭志磊, 徐國(guó)印, 等. 基于線性二次型的多級(jí)聯(lián)輸水渠道最優(yōu)控制[J]. 水科學(xué)進(jìn)展, 2018, 29(3): 383-389.
[22] HASHEMY S M, MONEM M J, MAESTRE J M, et al. Application of an in-line storage strategy to improve the operational performance of main irrigation canals using model predictive control[J]. Journal of Irrigation and Drainage Engineering, 2013, 139(8): 635-644.
[23] HASHEMY S S M, TAGHVAEIAN S, MAESTRE J M, et al. Developing a centralized automatic control system to increase flexibility of water delivery within predictable and unpredictable irrigation water demands[J]. Computers and Electronics in Agriculture, 2019, 163: 104862.
[24] SADOWSKA A, VAN OVERLOOP P J, BURT C, et al. Hierarchical MPC-based Control of An Irrigation Canal[M]//OCAMPO-MARTINEZ C, NEGENBORN R R. Transport of Water versus Transport over Water: Exploring the Dynamic Interplay of Transport and Water. Cham, Switzerland: Springer International Publishing. 2015.
[25] XU M. Model predictive control of an irrigation canal using dynamic target trajectory[J]. Journal of Irrigation and Drainage Engineering, 2017, 143(3): B4016004.
[26] 孔令仲, 雷曉輝, 張召, 等. 多級(jí)串聯(lián)明渠調(diào)水工程多目標(biāo)水位預(yù)測(cè)控制模型研究[J]. 水利學(xué)報(bào), 2022, 53(4): 471-482.
[27] 崔巍, 陳文學(xué), 郭曉晨, 等. 明渠閘前常水位運(yùn)行控制解耦試驗(yàn)研究[J]. 水力發(fā)電學(xué)報(bào), 2012, 31(6): 115-119, 125.
[28] 崔巍, 姚雄, 陳文學(xué), 等. 南水北調(diào)中線穿黃工程控制蓄量運(yùn)行方式研究[J]. 水力發(fā)電學(xué)報(bào), 2011, 30(3): 85-91.
[29] 孔令仲. 大型明渠輸水工程常態(tài)控制與應(yīng)急調(diào)控算法研究[D]. 杭州: 浙江大學(xué), 2021.
[30] SCHUURMANS J, BOSGRA O H, BROUWER R. Open-channel flow model approximation for controller design[J]. Applied Mathematical Modelling, 1995, 19(9): 525-530.
[31] 管光華, 朱哲立, 王康. 含多分水口的渠道廣義積分時(shí)滯(ID)控制建模及驗(yàn)證[J]. 水利學(xué)報(bào), 2022, 53(5): 598-607.
[32] 崔巍, 陳文學(xué), 穆祥鵬. 明渠運(yùn)行控制算法研究綜述[J]. 南水北調(diào)與水利科技, 2009, 7(6): 113-117, 122.
[33] 劉晉龍, 王忠靜, 楊志剛, 等. 灌區(qū)輸配水分段積分時(shí)滯模型及自適應(yīng)預(yù)測(cè)控制方法[J]. 水利學(xué)報(bào), 2023, 54(2): 232-243.
[34] 管光華, 鐘錁, 廖文俊, 等. 基于無量綱性能指標(biāo)的渠系控制器參數(shù)優(yōu)化[J]. 農(nóng)業(yè)工程學(xué)報(bào), 2018, 34(7): 90-99.




